A15.Servomotor
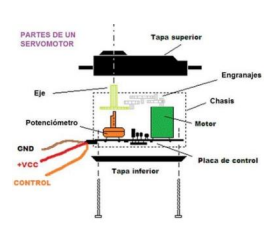
En aquesta pràctica farem servir un servomotor. És un element molt utilitzat en robòtica. És un tipus de motor que pot posicionar el seu eix en un angle determinat. Per funcionar necessita l'alimentació (GND i VCC) i un senyal de control. Generalment els servomotors poden girar uns 180° però hi ha alguns models que poden girar més, fins i tot de rotació contínua.
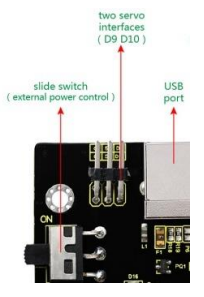
La placa de control del KEYBOT disposa de dues sortides per poder connectar servomotors (D9 i D10). Com que ja fem servir D9 per al led farem servir D10 pel nostre servomotor. Aquest anirà connectat directament a la placa de control sense fer servir el connector RJ11 sinó al connector de 3 pins. Per fer connectar-lo ens hem de fixar en els colors dels cables: Negre GND - Vermell VCC - Taronja D10 (senyal).
Existeix un bloc específic per poder controlar els servomotors. Aquest bloc s'anomena “Motor”.

Activitat d'ampliació: fes un programa que faci moure el servomotor entre dos angles en funció del sensor de línia que detecta:
S1:30° S2:90° S3:150°
Solució:
