A09. Moviments del robot
Aquest serà una de les parts més importants de la programació, ja que haurem de programar els moviments del robot mitjançant l'accionament dels motors.
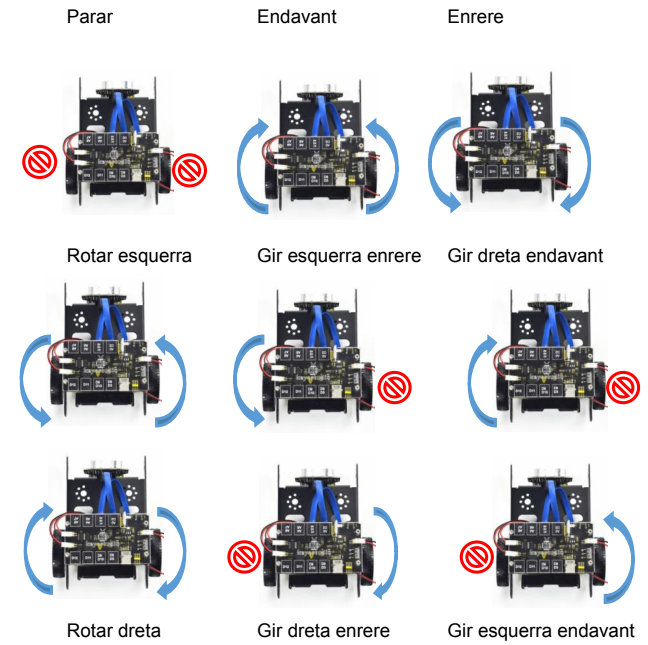
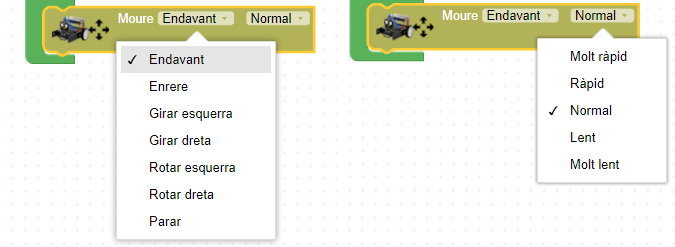
En total podrem fer 9 moviments diferents, encara que en els blocs definits podrem fer 7 combinacions. Les combinacions que no hi ha són les de girar a dreta i esquerra cap enrere. Però es poden dissenyar amb els bloc que configuren motors.
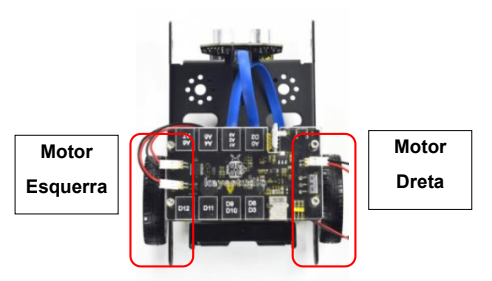
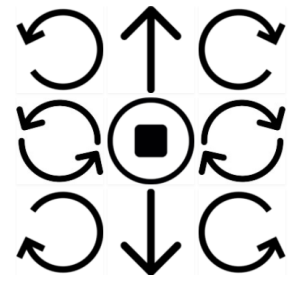
Els moviments del KEYBOT dependran del sentit de gir de cadascun dels motors. Aquí tenim quin és el sentit de cada motor en funció del moviment desitjat:
Amb aquest bloc també podem triar la velocitat dels moviments.
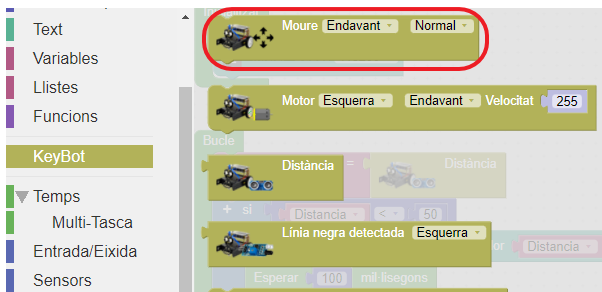
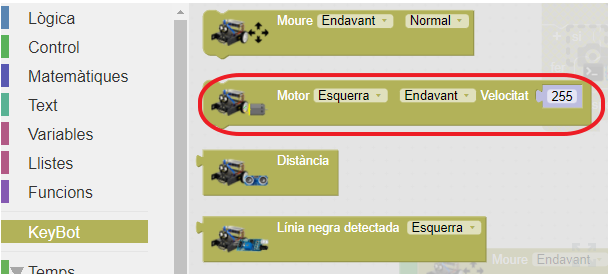
També existeix un bloc específic per al control de cadascun dels motors. Aquest bloc ens permet triar el motor, el sentit de gir i la velocitat.
Farem un programa que faci una seqüència de moviments cada 2 segons. La seqüència serà:


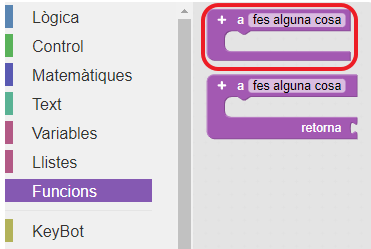
Ara provarem de dissenyar els dos moviments que falten. Però crearem una funció que consisteix en agrupar una sèrie de blocs i assignar-li un nom.
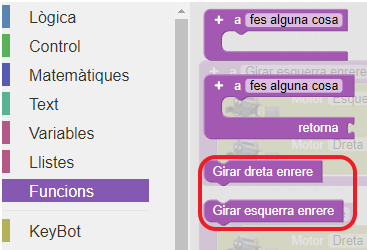
La primera funció serà gir esquerra enrere. El motor esquerra anirà cap enrere i el motor de la dreta estarà aturat. Li donarem el valor de 128 que correspon a la velocitat normal. Farem el mateix per l'altra funció.

Ara apareixen dues noves funcions al bloc de “Funcions”.
Ara ja tenim el programa amb tots els moviments possibles del Keybot.

Activitat d'ampliació: modificarem el programa per a que el KEYBOT faci el següent:
- Marxi cap endavant si no detecta cap obstacle una distància superior a 20cm.
- Si detecta entre 15 i 20cm s'aturarà.
- Si detecta que la distància a l'objecte que té al davant és menor o igual a 15cm ha de tirar enrere.
- Quan el KEYBOT faci marxa enrere ha d'avisar amb el led i el brunzidor (igual com ho fan alguns vehicles). El led farà una intermitència i el brunzidor anirà fent un soroll intermitent.
Perquè sigui una mica més fàcil podeu partir d'aquest programa…

Solució:
