Components del robot KEYBOT
El robot KEYBOT es basa en la plataforma Arduino de codi obert, flexible i fàcil de programar. La placa de control del KEYBOT porta uns connectors RJ11 per facilitar la connexió dels sensors i actuadors.
El robot està dissenyat en una estructura metàl·lica, sòlida i resistent. L'assemblatge és molt senzill i es triga al voltant d'1 hora en muntar tot el robot i realitzar les connexions. Per fer l'ampliació trigarem mitja hora més aproximadament, depenent de les habilitats de la persona.

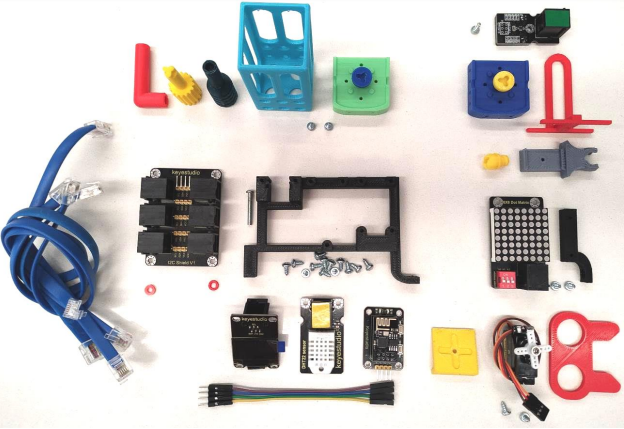
Llistat de material de la caixa:
| Component | Quantitat | |
| 1 | Targeta de control | 1 |
| 2 | Panell acrílic superior de protecció de la targeta de control | 1 |
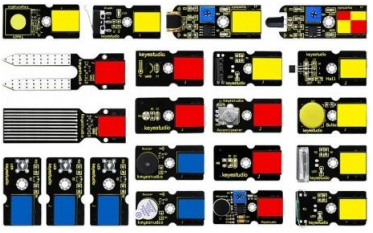
| 3 | KEYBOT Sensor d'ultrasons | 1 |
| 4 | KEYBOT Sensor de Línia | 1 |
| 5 | Mòdul Bluetooth (HC-06) | 1 |
| 6 | Roda universal d'acer W420 | 1 |
| 7 | Motor reductor d'eix simple amb cable KF2510-2P, cable negre i vermell de 200mm Dreta | 1 |
| 8 | Motor reductor d'eix simple amb cable KF2510-2P, cable negre i vermell de 140mm Esquerra | 1 |
| 9 | Suport bateries de 2 cel·les 18650 | 1 |
| 10 | Suport bateries de 6 cel·les AA | 1 |
| 11 | Roda de robot 6515 blanc i negre | 2 |
| 12 | Separador hexagonal de coure M3x40mm de doble pas | 4 |
| 13 | Pilar hexagonal de coure M3x15 (6mm) | 4 |
| 14 | Cargol M3x30mm cap rodó | 4 |
| 15 | Cargol de cap pla M3x8mm | 4 |
| 16 | Cargol hexagonal d'acer inoxidable M3x8mm | 10 |
| 17 | Cargol hexagonal d'acer inoxidable M3x10mm | 10 |
| 18 | Femella M3 niquelada | 14 |
| 19 | KEYBOT cos del robot color negre | 1 |
| 20 | Tornavís Phillips 3x40mm | 1 |
| 21 | Led amb connector RJ11 | 1 |
| 22 | Cable 6P6C RJ11 10cm blau | 1 |
| 23 | Cable 6P6C RJ11 20cm blau | 2 |
| 24 | Clau Allen M2.5 tipus L niquelada | 1 |
| 25 | Cable USB | 1 |
| 26 | Manual d'usuari | 1 |
A la caixa del robot KEYBOT trobarem les següents peces, així com un manual de muntatge del robot.

Les característiques del robot KEYBOT són les següents:
- Rang d'alimentació: entre 7V i 12V.
- Rang de corrent: mínim 800mA.
- Velocitat del motor: a 6.0V 100rpm/min.
- Controlador de motors: TB6612.
- Tres sensors d'infrarojos
- Per seguiment de línia i detector diferència entre blanc i negre.
- Per detectar caigudes.
- Mòdul d'ultrasons: per a detectar obstacles o mesurar distàncies.
- Brunzidor: permet emetre sons.
- Led: indicador fer indicacions visuals.
- Mòdul inalàmbric Bluetooth HC-06: per poder controlar el robot de forma remota.
- Dos motors de corrent continu.
- Dues rodes de goma per millorar l'adherència.
- Placa de control Keybot Control Board: amb connector RJ11 per facilitar les connexions.
- Estructura metàl·lica molt resistent.
- Interruptor: permet encendre i apagar el robot.
- Suport piles: per a 6 piles AA.
- Suport bateries: per a 2 bateries 18650.
- Placa d'expansió de comunicacions I2C.
Elements addicionals:
- Hub I2C: element que ens permet connectar dispositius I2C.

- Matriu de leds 8×8: 64 leds configurables.

- Pantalla OLED: pantalla de 0,96” (128×64).

- Sensor de color: permet detectar colors.

- Servomotor: motor que podem controlar la seva posició.

- Sensor DHT22

- Mòdul de comunicacions Wifi (adaptador + antena).

- Cable RJ11.

- Accessoris impresos en 3D per poder subjectar els elements addicionals (i alguns cargols metàl·lics).
- Altres elements que es podrien connectar…