Guia de muntatge
A continuació, procedirem a realitzar els passos de muntatge del robot KEYBOT de forma molt resumida i gràfica (hi ha un manual d'instruccions al kit de robot).
Molt important tenir en compte que hi ha un problema amb el Manual d'usuari que ve en el kit, ja que hi ha un pas malament. Els motors s'han de col·locar després d'instal·lar el suport de les piles, ja que si no es fa així no es poden posar els cargols per subjectar el suport.
Es convenient per poder collar les femelles de fer servir unes alicates i, opcionalment, es poden substituir les femelles que venen en el kit per femelles autoblocants.
 |  |
|---|---|
| Alicates de punta | Femella autoblocant |
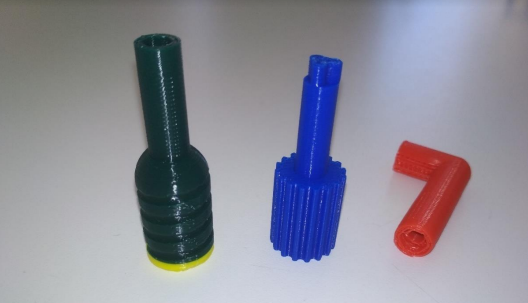
També es poden fer servir eines pròpies, en aquest cas aquestes fetes en 3D.

Passos a seguir en el procés de muntatge:
- Pas 1: Muntatge de l'estructura.
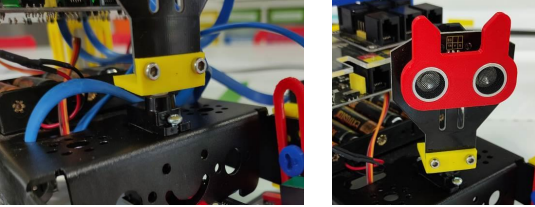
- Pas 2: Col·locació del sensor d'ultrasons.
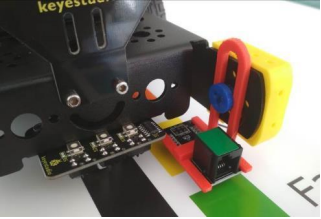
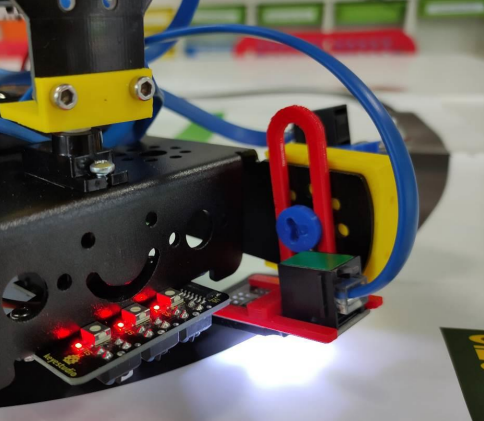
- Pas 3: Ara instal·larem els sensors del seguidor de línia i la roda d'acer.
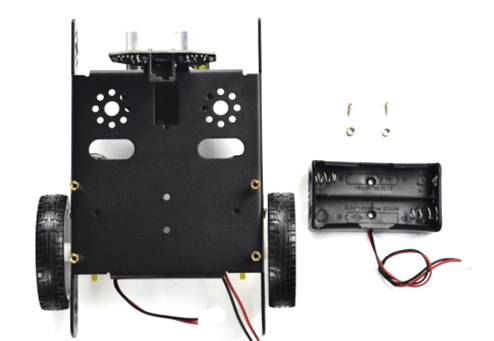
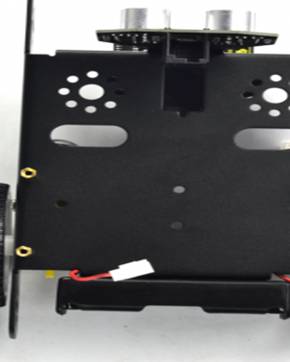
- Pas 4: Instal·lació del suport de les bateries 18650.
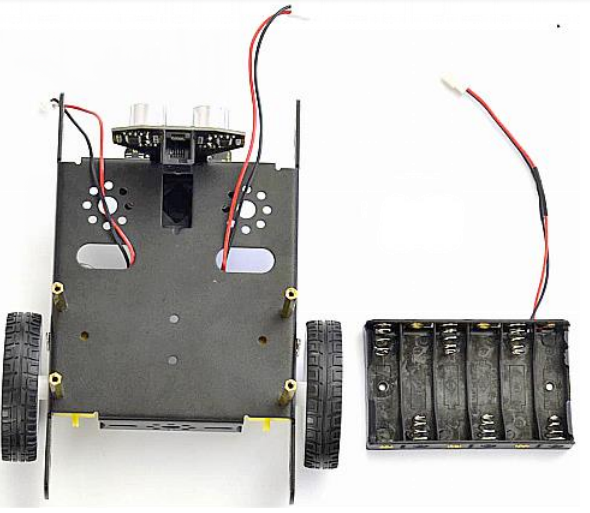
- Pas 5: Instal·lació del suport de les bateries AA.
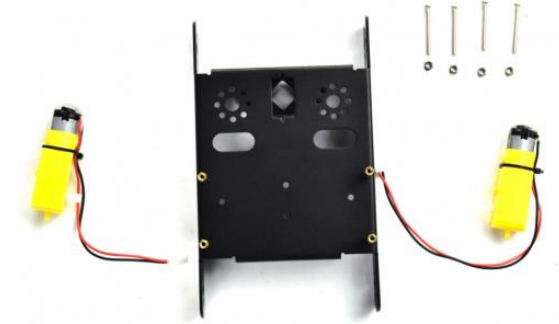
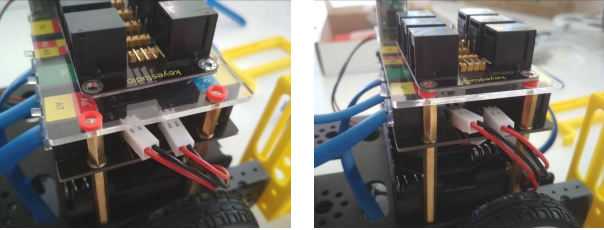
- Pas 6: Muntatge dels motors.
- Pas 7: Col·locació de les rodes.
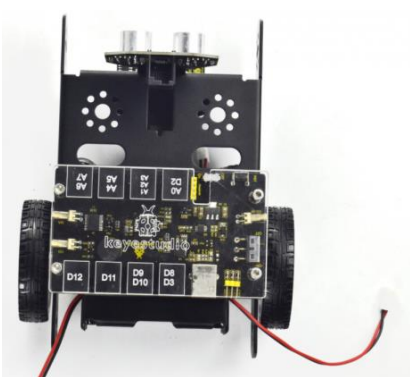
- Pas 8: Col·locarem la placa de control a l'estructura del robot.
- Pas 9: El següent pas és instal·lar el protector acrílic de la placa de control.
- Pas 10: Connexió dels sensors i actuadors.
- Pas 11: Instal·lació del kit d'ampliació.
En el robot hi ha un manual de muntatge. Hi ha un error en el procediment, ja que si es munten els motors al principi després s'han de treure per muntar el suport de les bateries.
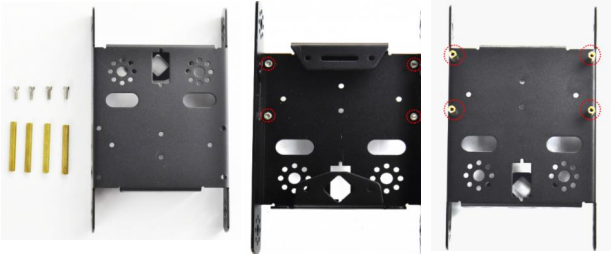
Pas 1: Muntatge de l'estructura.
- 1 un. Estructura del robot
- 4 un. Cargol hexagonal M3x8mm
- 4 un. Separador de coure doble pas M3x40mm
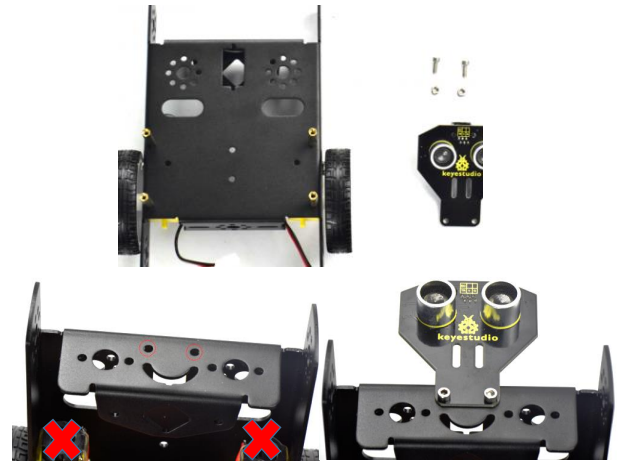
Pas 2: Col·locació del sensor d'ultrasons.
- 2 un. Cargol hexagonal d'acer inoxidable M3x8mm
- 2 un. Femella niquelada M3
- 1 un. Sensor d'ultrasons
Pas 3: Ara instal·larem els sensors de seguidor de línia i la roda d'acer.
- 2 un. Cargol hexagonal d'acer inoxidable M3x10mm
- 2 un. Femella niquelada M3
- 1 un. Mòdul sensor de línies
- 1 un. Roda d'acer W420

Pas 4: Instal·lació del suport de les bateries 18650.
- 2 un. Cargol de cap pla M3x8mm
- 2 un. Femella niquelada M3
- 1 un. Suport bateries 18650
Pas 5: Instal·lació del suport de les bateries AA.
- 2 un. Cargol de cap pla M3x8mm
- 2 un. Femella niquelada M3
- 1 un. Suport bateries AA
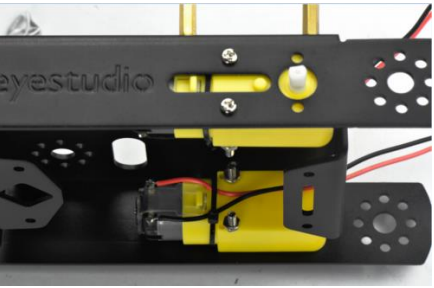
Pas 6: Muntatge dels motors.
- 2 un. Motor reductor
- 4 un. Cargol de cap rodó M3x30mm
- 4 un. Femella niquelada M3
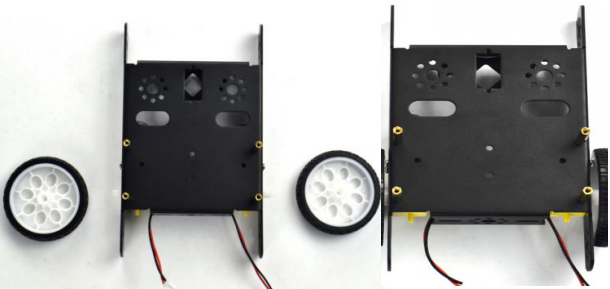
Pas 7: Col·locació de les rodes.
- 2 un. Roda 6515
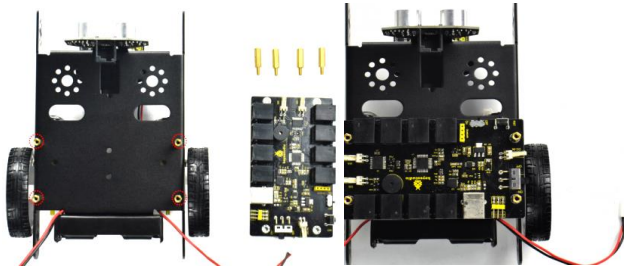
Pas 8: Col·locarem la placa de control a l'estructura del robot.
- 4 un. Separador de coure M3x15mm
- 1 un. Placa de control Keybot Control Board
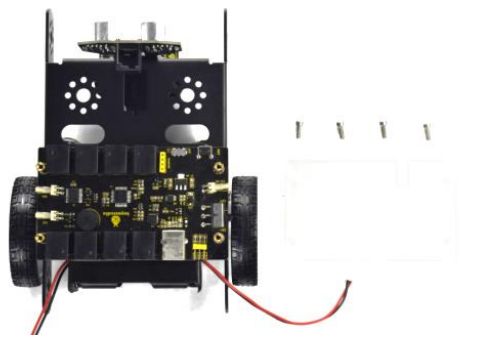
Pas 9: El següent pas és instal·lar el protector acrílic de la placa de control.
- 4 un. Cargol hexagonal d'acer inoxidable M3x10mm
- 1 un. Panell superior acrílic
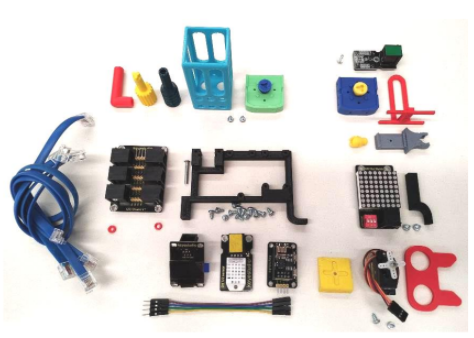
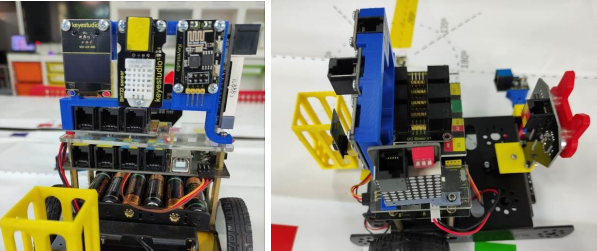
Instal·lació del kit d'ampliació
A continuació, mostrarem com instal·lar el kit d'ampliació. Aquest kit consta de:
- Hub I2C
- Sensor de colors
- Pantalla OLED
- Matriu 8×8
- Servomotor
- Sensor DHT22
- Accessoris impresos en 3D per subjectar els elements anteriors
- Cables RJ11
- Mòdul Wifi
Pas 10: Connexió dels sensors i actuadors.
Procés de muntatge dels elements 3D:
- Aquests són les eines que podeu fer servir per muntar el robot.

- Muntatge del sensor de color.
- Muntatge del Hub I2C.
- Muntatge de la matriu de leds.

- Col·locació de la pantalla OLED + Sensor DHT22 + Mòdul Wifi.
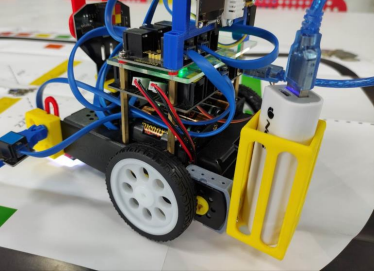
- Muntatge del portabateria.
- Muntatge del suport del led.
- Muntatge de la cara (servomotor + sensor ultrasons).
- Robot muntat! Trigareu una mitja hora (aproximadament).
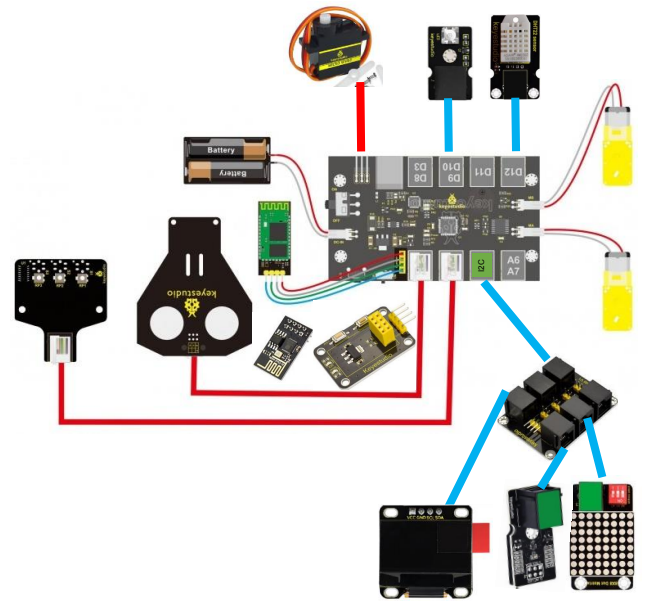
Guia de connexió
Ara procedirem a realitzar la connexió del cablejat. Farem les connexions tal i com indica la taula de l'apartat 4. Connectarem amb els cables RJ11 els sensors i actuadors de color verd i la resta amb els seus connectors corresponents.
El mòdul Bluetooth o el mòdul Wifi els connectarem directament a la placa de control. Haurem de posar l'interruptor associat al mòdul en la posició OFF per poder enviar el programa a la placa. Hem de tenir cura alhora de connectar el mòdul Wifi i fixar-nos amb les connexions, ja que les hem de fer amb cables Dupont.
La placa Hub I2C permet connectar dispositius I2C. Aquí connectarem el sensor de colors, la pantalla OLED i la matriu 8×8.
Pas 11: Connexió dels sensors i actuadors.
El servomotor va al connector de la part superior (més separat de la placa).
El Hub I2C es connecta al connector I2C de la placa (A4/A5) des de qualsevol connector de la placa i la resta de components es connecten a la resta de connectors del hub.
Esquema de connexions: