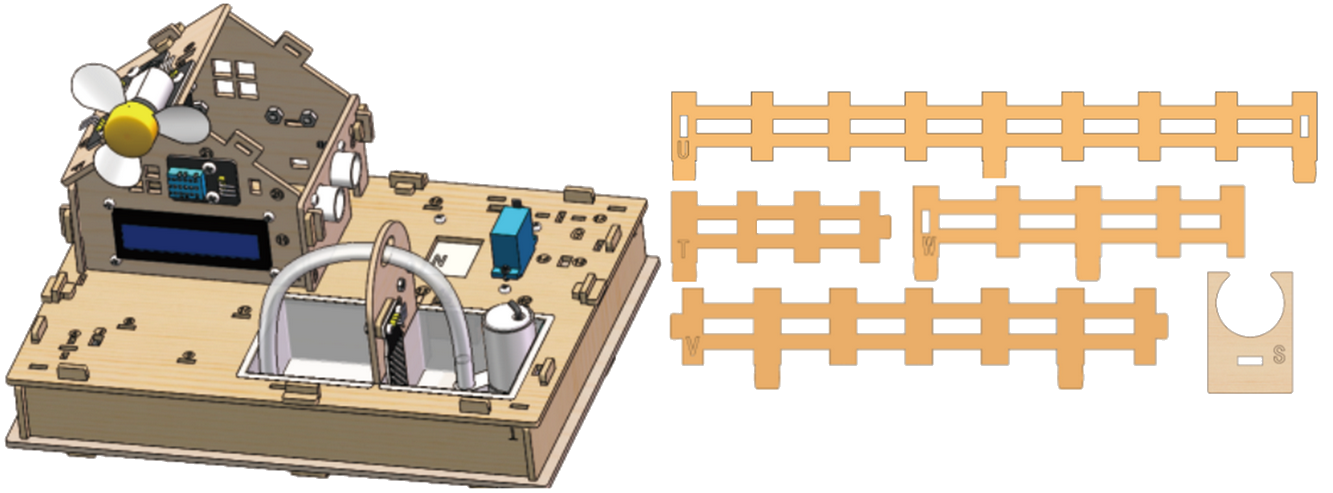
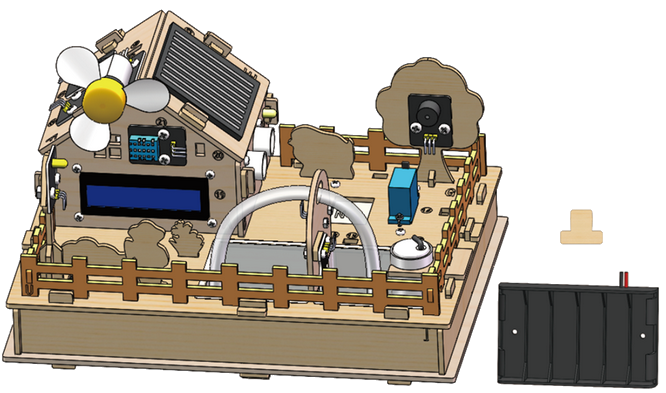
El muntatge es pot dividir en dues parts: muntatge de les peces i components i el connexionat dels elements electrònics.
Connexionat dels elements electrònics

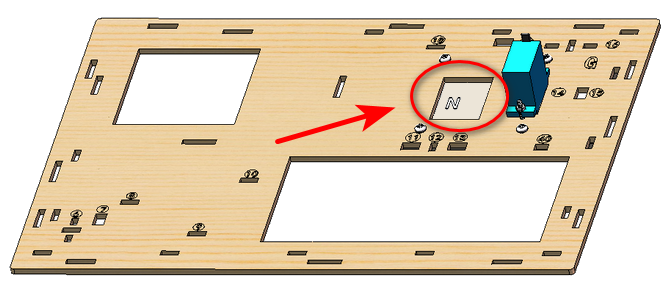
Els components electrònics porten serigrafiades aquestes lletres al costat dels pins metàl·lics de connexió.
Pas 1
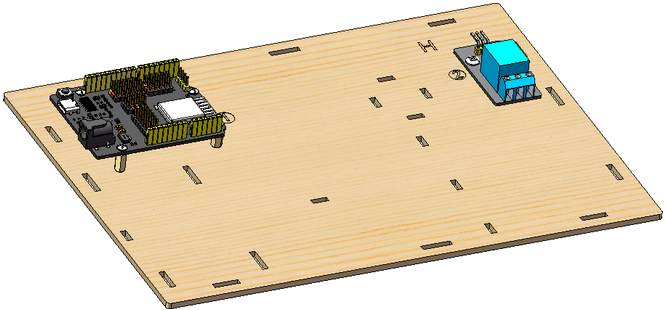
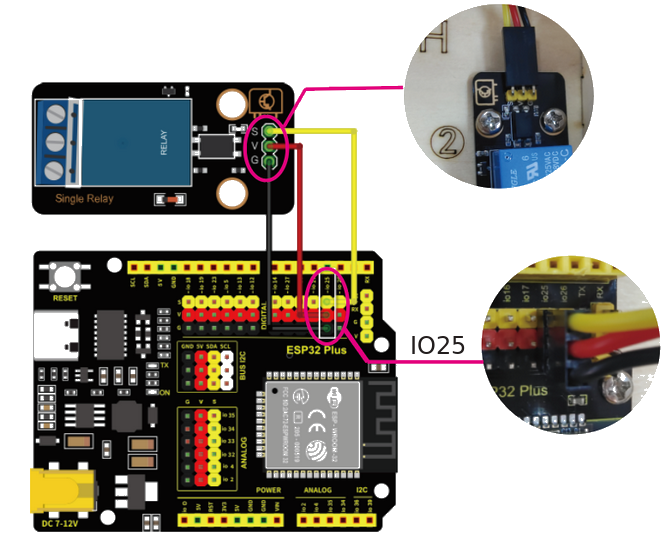
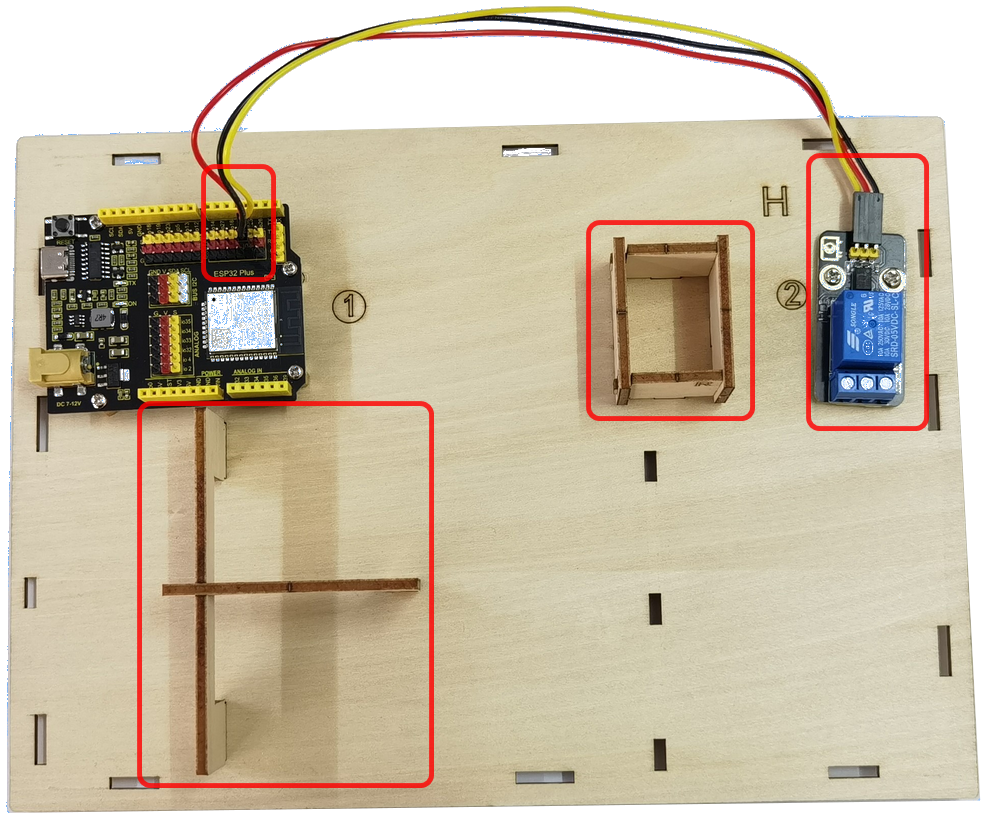
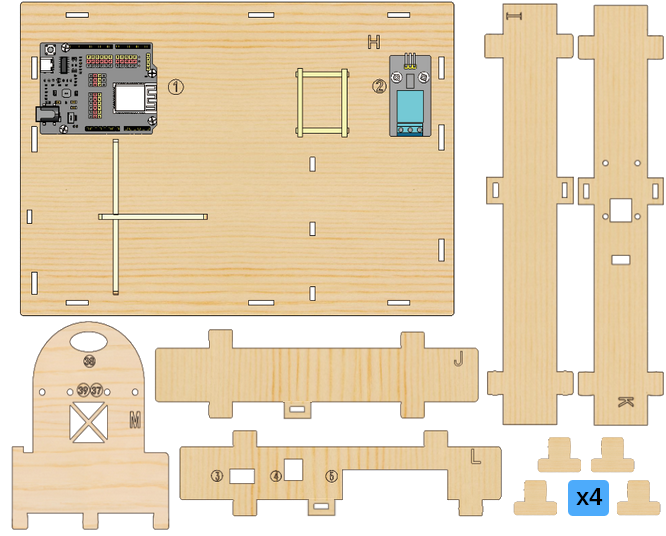
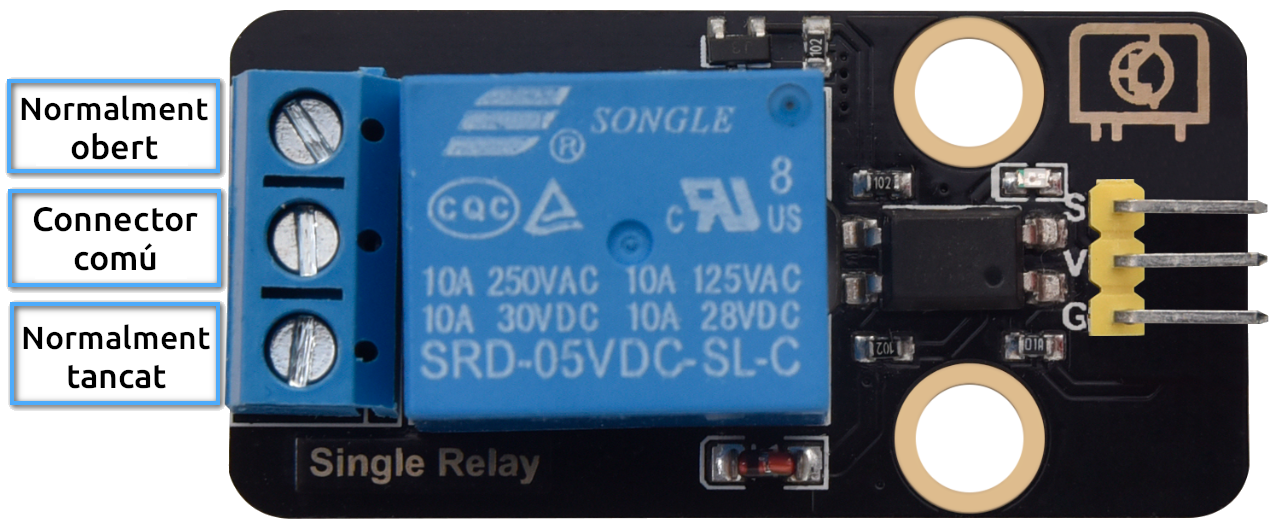
Placa ESP32 STEAMakers i mòdul relé per controlar la bomba d'aigua

![]()


![]()

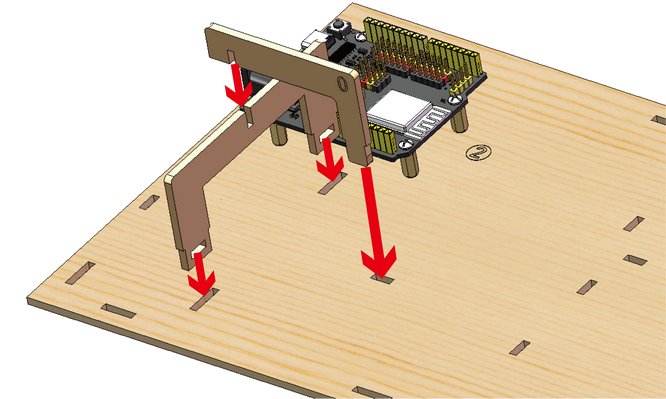
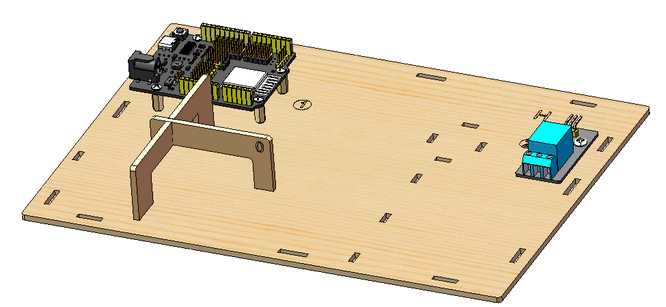
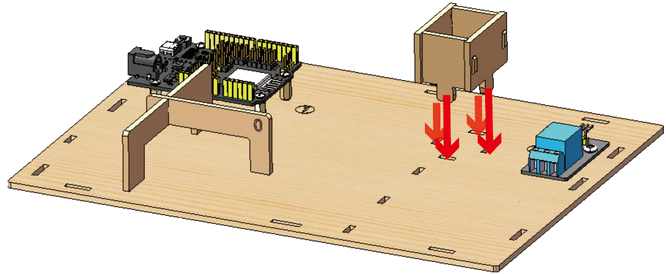
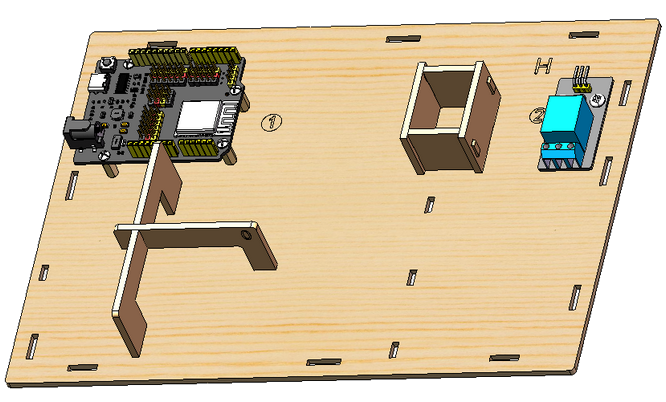
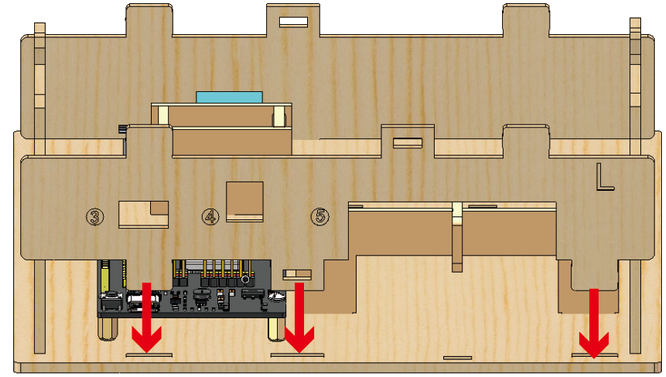
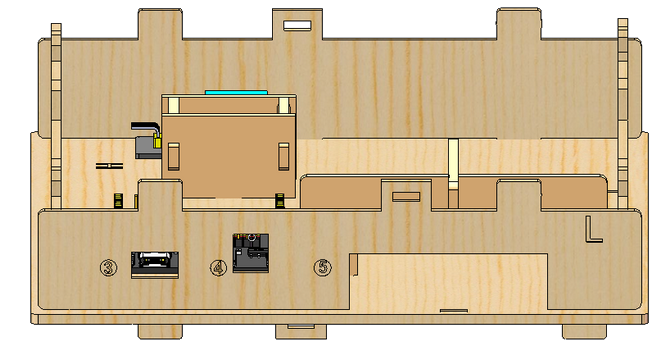
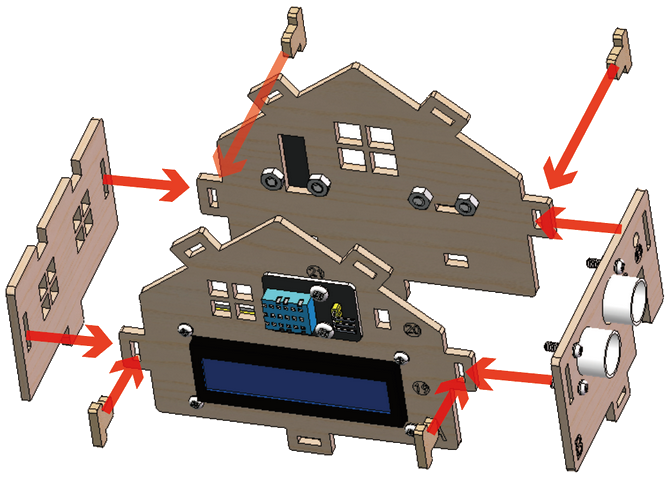
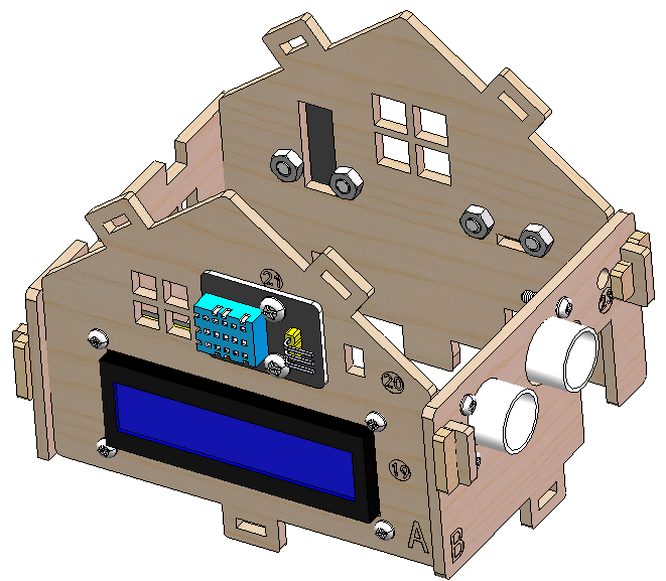
Pas 2

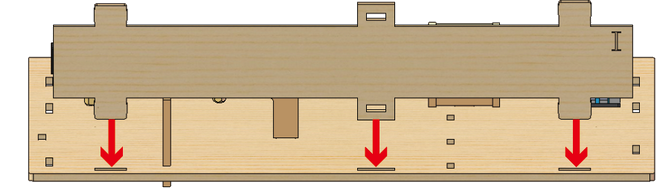
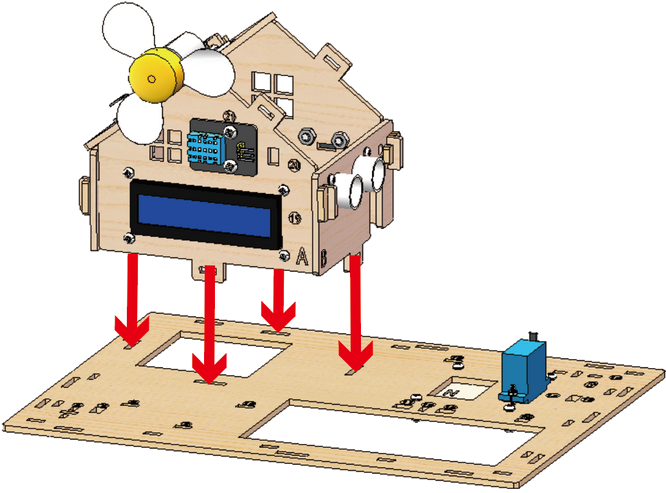
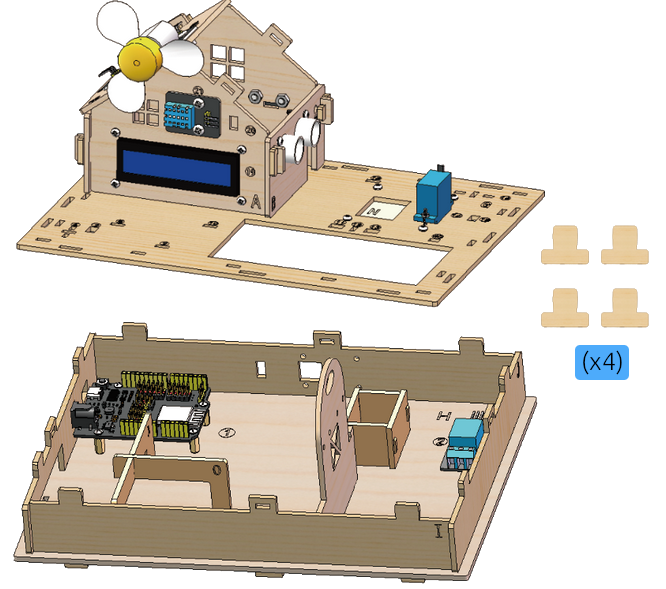
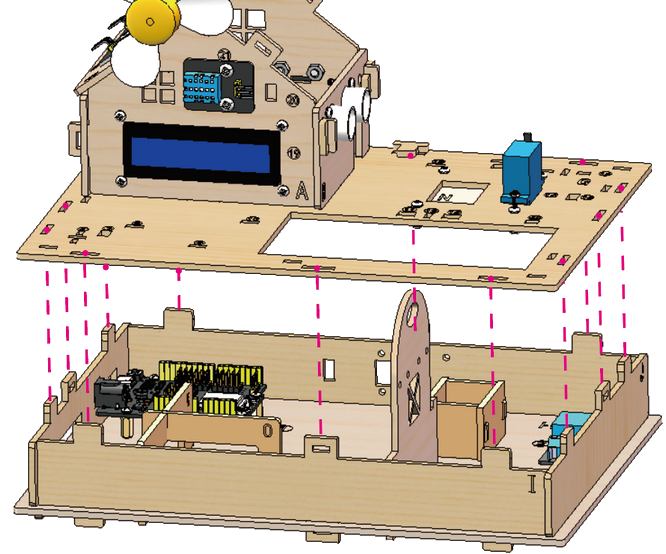
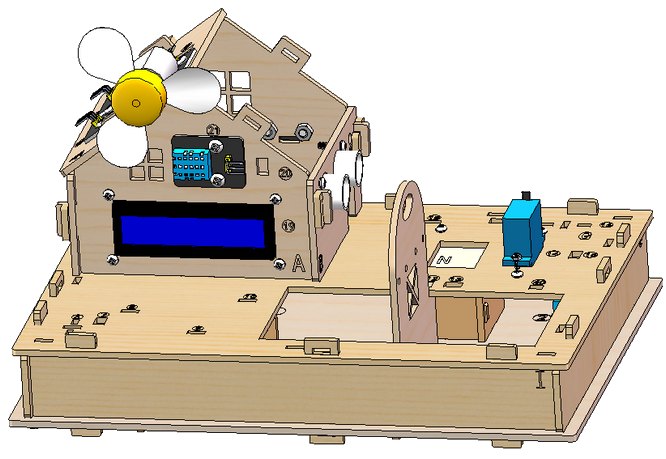
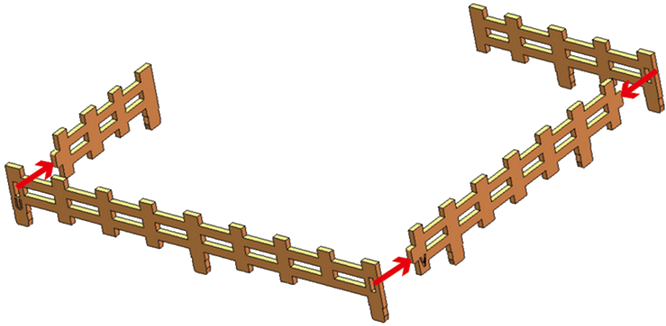
![]() Munteu el tauler de fusta X i O a la placa inferior H
Munteu el tauler de fusta X i O a la placa inferior H
![]()

![]()
| Component | Cable | Pin |
|---|---|---|
| Mòdul relé | 3 pins / 20 cm | io25 |
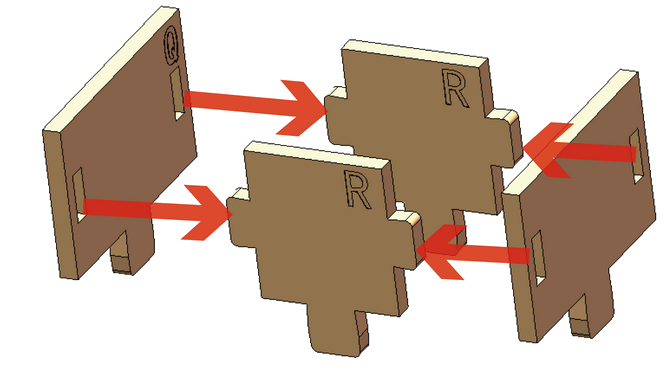
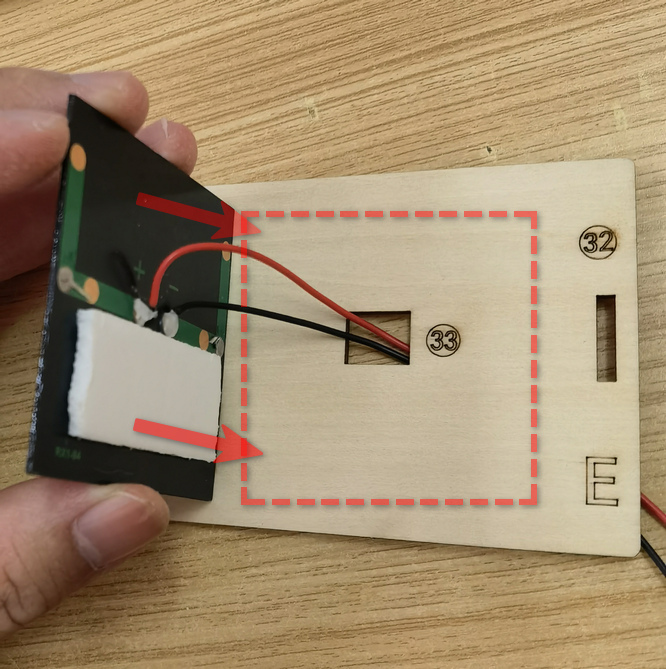
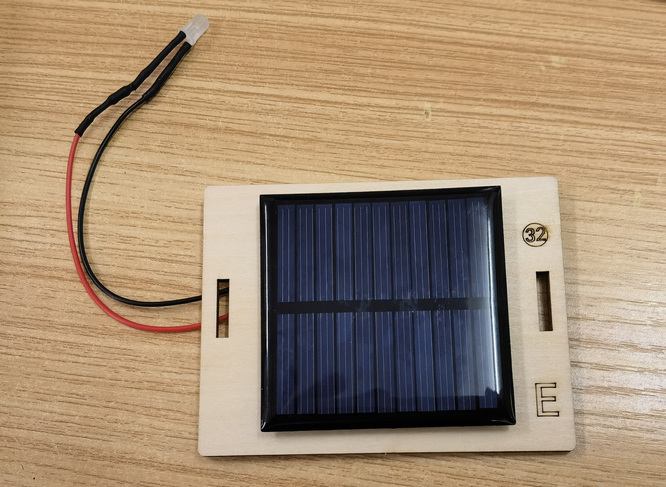
Pas 3
![]()
![]()
![]()
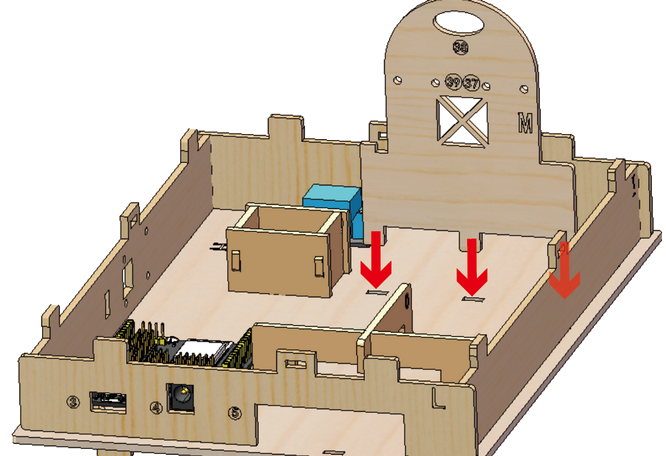
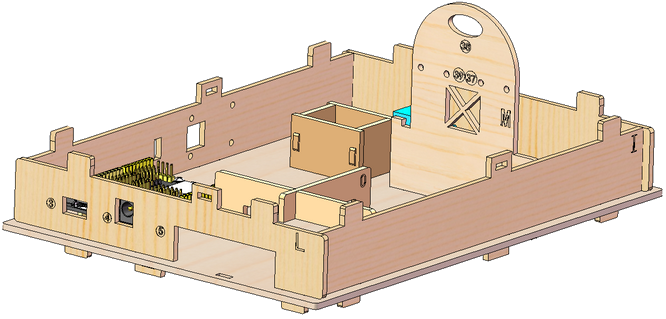
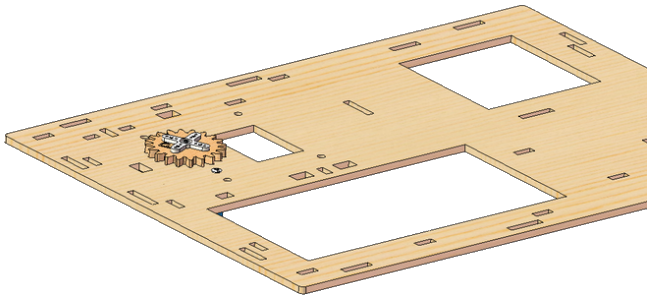
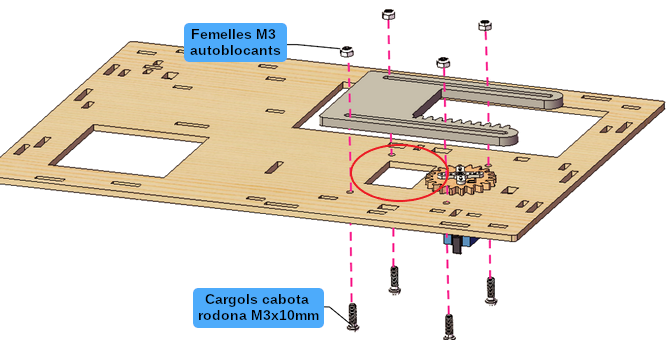
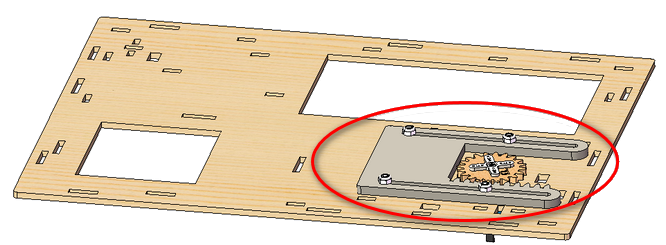
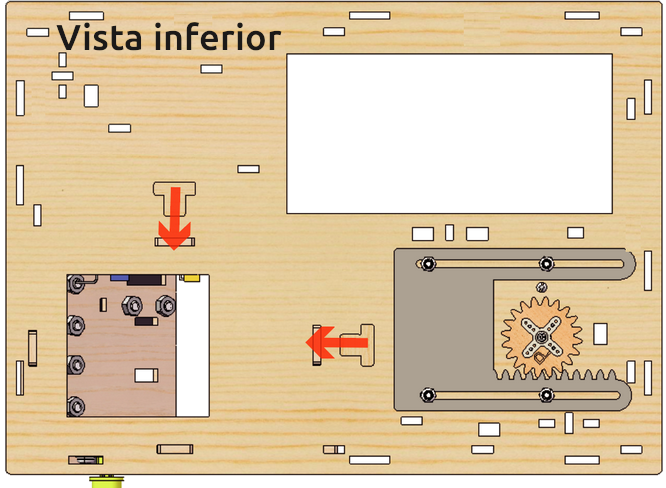
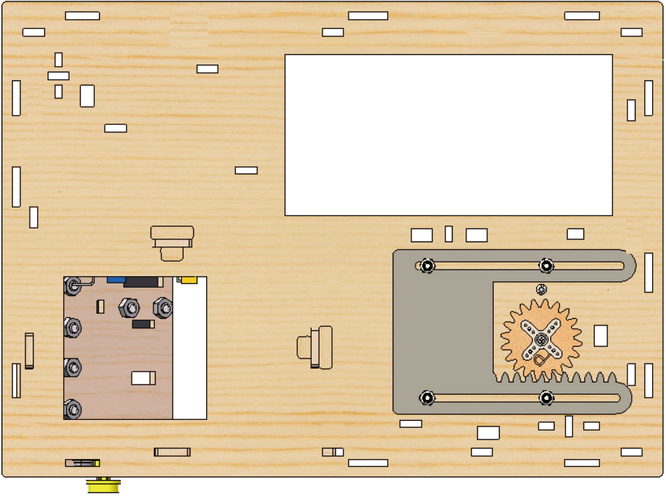
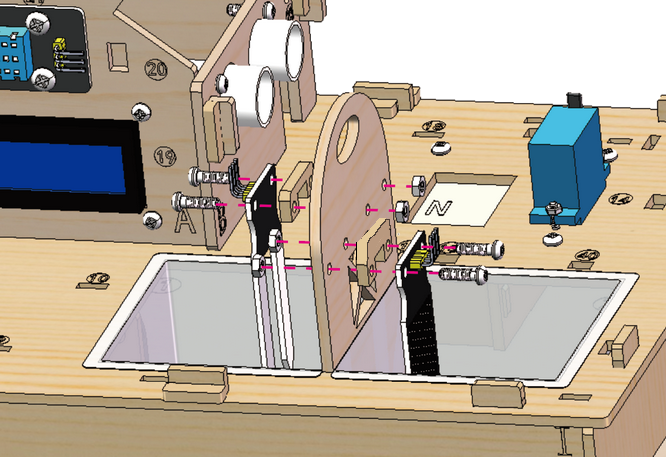
Pas 4
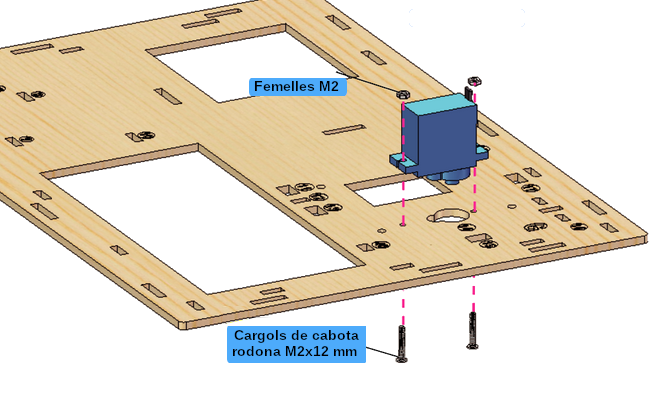
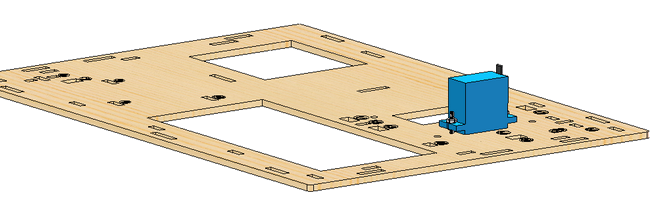
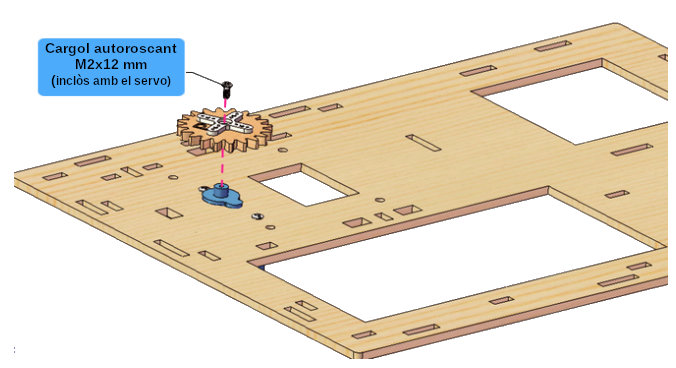
Servomotor i engranatge d'accionament de la portella
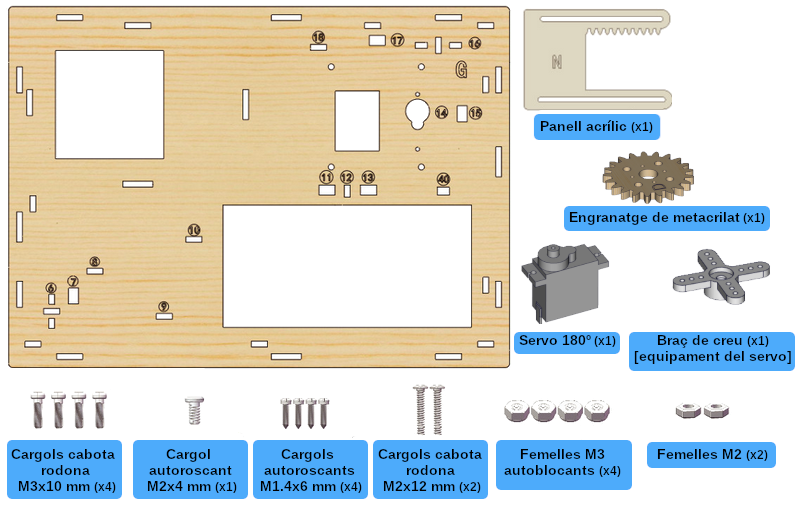
 És necessari establir l'angle correcte del servomotor abans de fixar-hi l'engranatge.
El muntatge es farà amb la finestra tancada, tal i com es mostra a les imatges de l'apartat 4.
A continuació mostrem dues maneres diferents d'establir correctament l'angle del servo:
És necessari establir l'angle correcte del servomotor abans de fixar-hi l'engranatge.
El muntatge es farà amb la finestra tancada, tal i com es mostra a les imatges de l'apartat 4.
A continuació mostrem dues maneres diferents d'establir correctament l'angle del servo:- Programació amb MicroBlocks
- Programació amb Arduinoblocks
Programació del servo
Programació amb MicroBlocks

Abans de fer servir la placa ESP32 STEAMakers amb MicroBlocks cal configurar-la.
Amb la placa connectada al port USB i a l'entorn MicroBlocks ( aquí s'explica com fer-ho), feu servir qualsevol dels mètodes següents.
Atenció
Connecteu el servomotor al pin IO14 (D7).
#Mètode 1: llibreria Servomotor
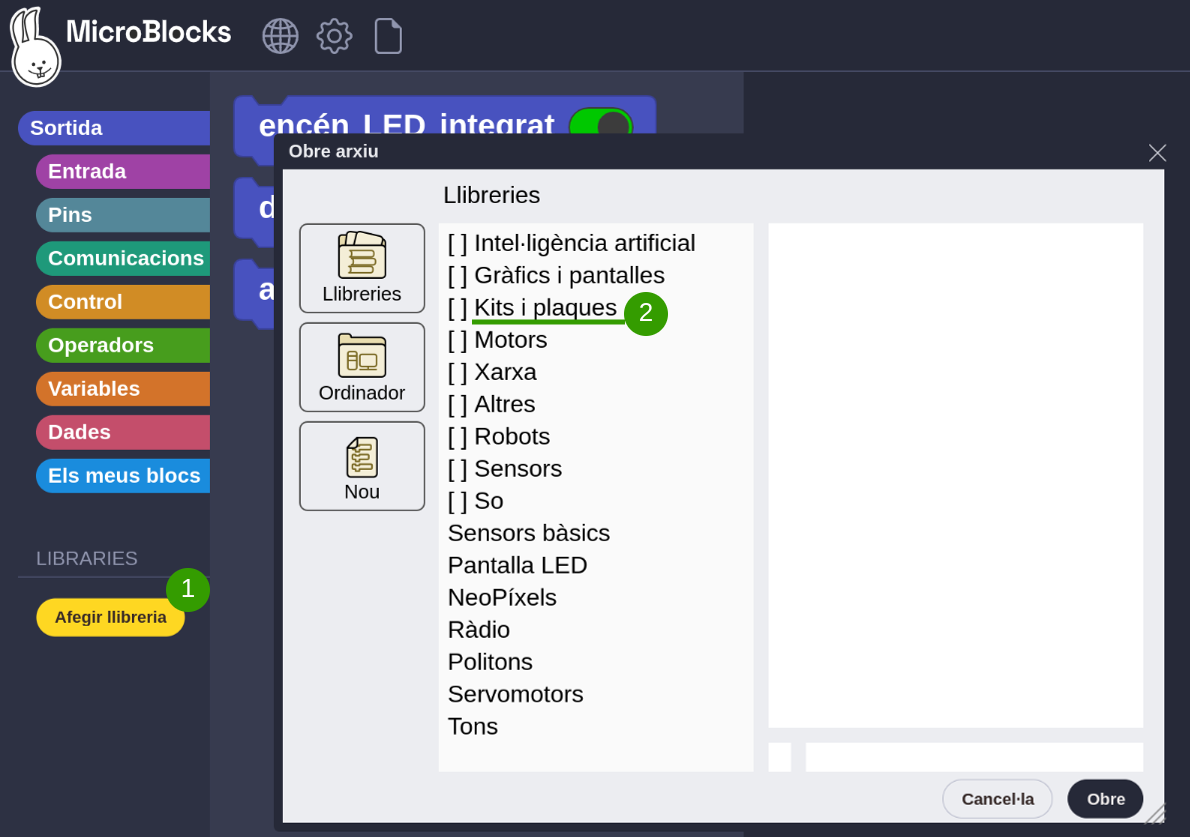
1.- Carregueu la llibreria «Servomotors» fent clic al botó Afegir Llibreria.
A la finestra emergent que apareixerà, feu doble clic a «Servomotors»- També podeu seleccionar «Servomotors» i després fer clic al botó «Obre»:

2.- A la columna esquerra apareixerà una nova categoria: «Servomotors».
Feu-hi clic al damunt per veure els blocs que conté.
3.- Seleccioneu el bloc «posa el servo …» que es mostra a la imatge:

4.- Connecteu el servomotor al pin 14 (D7). Si feu servir un pin diferent, poseu aquest valor al primer paràmetre del bloc.
El segon és l'angle. Ha de ser «-90» graus.
5.- Feu clic al bloc per posicionar el servomotor.
#Mètode 2: llibreria Smart Farm
1.- Carregueu la llibreria «Smart Farm»:
![]() Afegir llibreria ›
Afegir llibreria › ![]() Kits i plaques ›
Kits i plaques › ![]() Smart Farm
Smart Farm

2.- Busqueu el bloc

A la llista desplegable, haureu de canviar el valor «obre» per «tanca».
3.- Feu clic al bloc anterior per posicionar el servomotor.
Programació amb Arduinoblocks
A l'enllaç anterior també hi trobareu instruccions per començar a utilitzar Arduinoblocks.
Atenció
No oblideu executar el programa AB-Connector i connectar el servomotor al pin IO14 (D7).
Elaboreu el programa següent i pujeu-lo a la placa ESP32STEAMakers per posicionar correctament el servomotor a 180º. Connecteu el servomotor al pin IO14 (D7):

El codi del programa resultant és el següent:
#include <ESP32Servo.h> Servo servo_14; void setup() { servo_14.attach(14); } void loop() { yield(); servo_14.write(180); }
![]()
![]()


![]()
![]()
* Connecteu el servomotor al pin IO14 (D7)
| Component | Cable | Pin |
|---|---|---|
| Servomotor | El propi del servomotor | io14 |
")

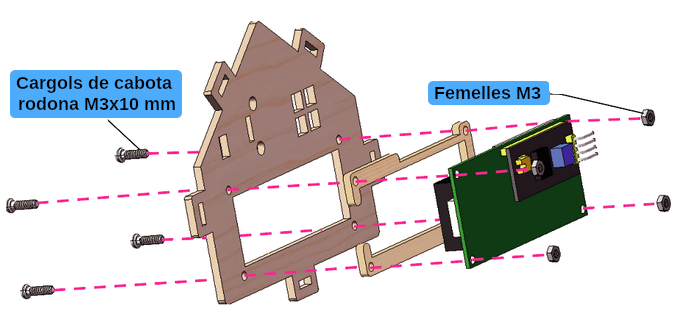
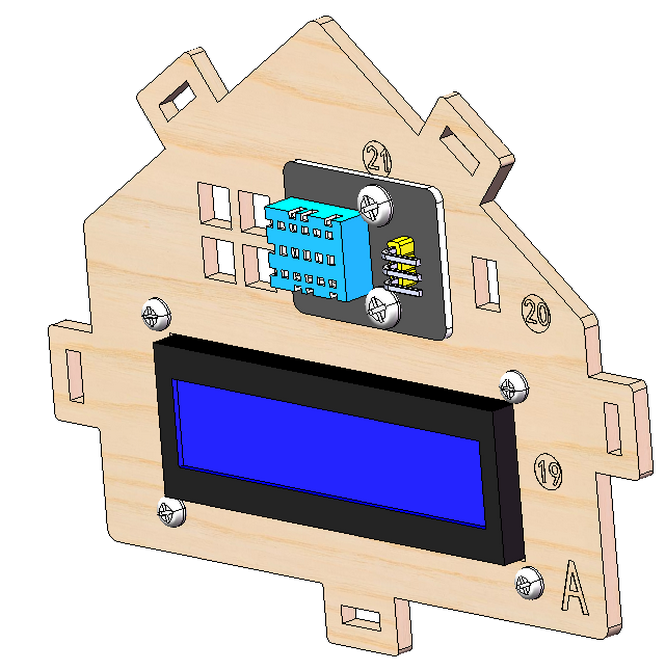
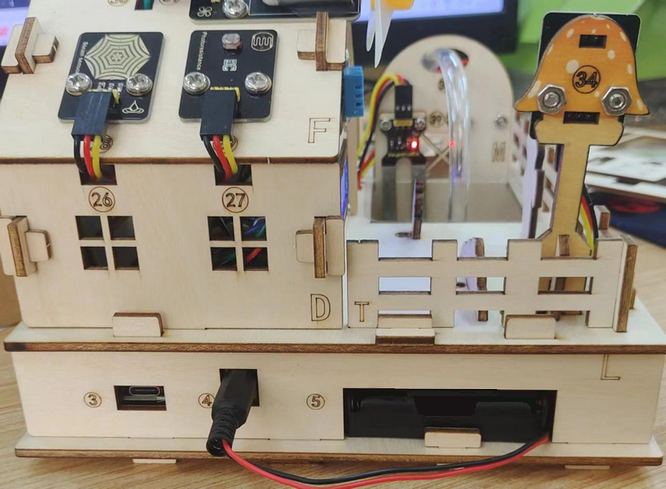
Pas 5
Pantalla LCD i sensor d'humitat i temperatura (DHT11)

![]()
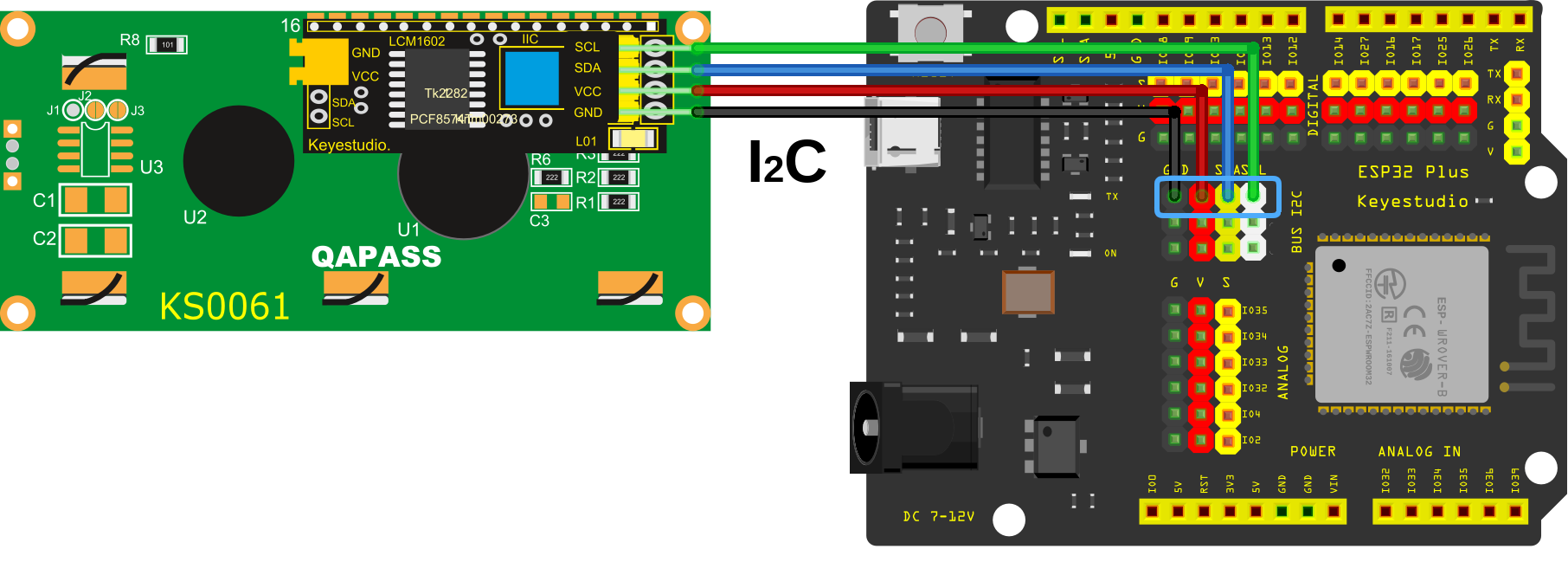
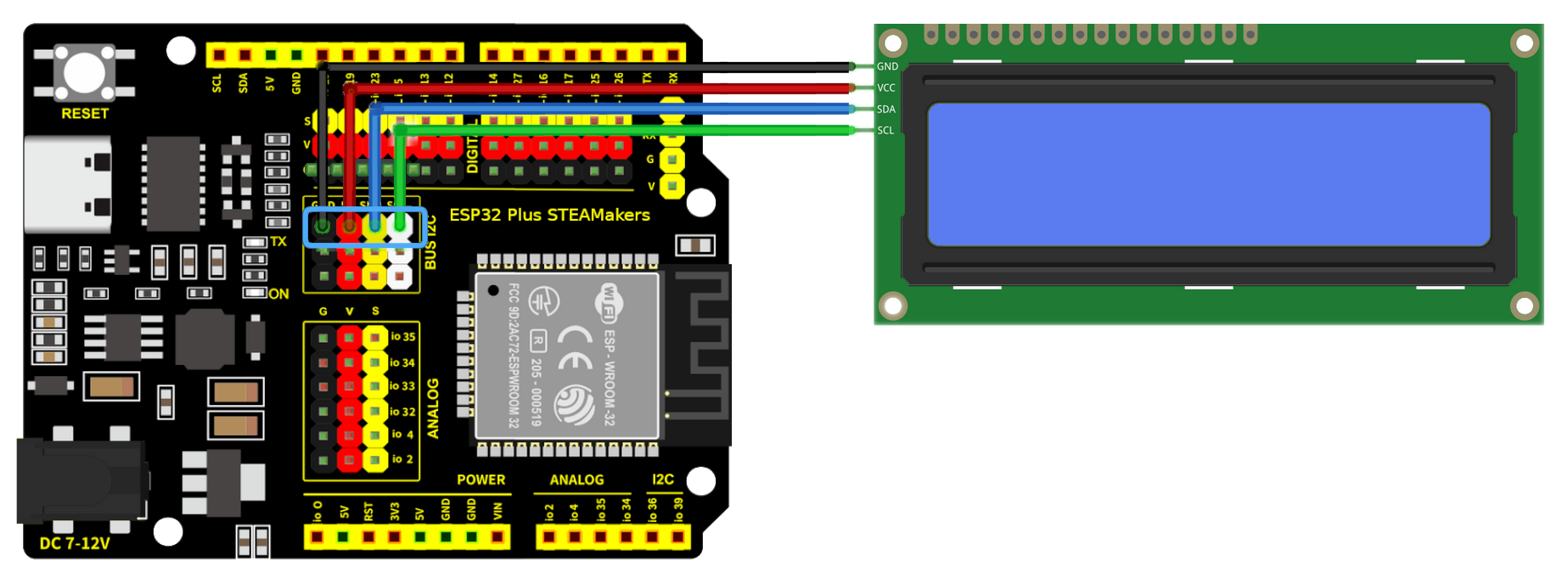
Pantalla LCD

![]()
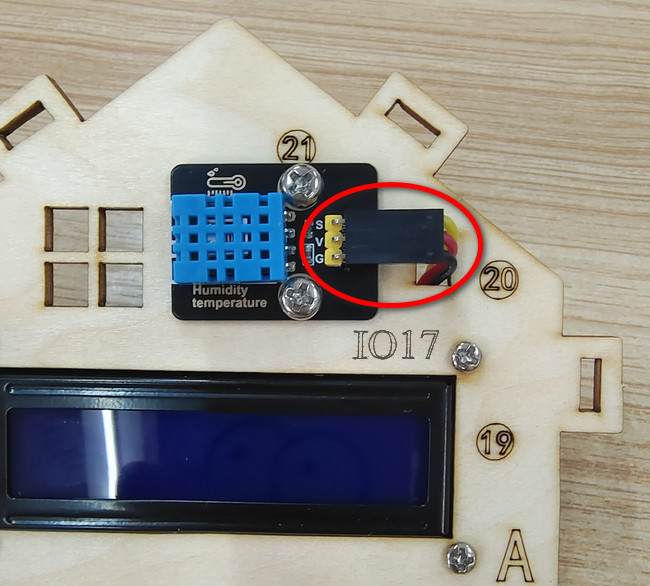
Sensor d'humitat i temperatura

Atenció al color dels cables
- Per al sensor de temperatura i humitat DHT11, connecteu el groc a S, el vermell a V, el negre a G.
- Per a la pantalla LCD, connecteu el verd a SCL, el blau a SDA, el vermell a VCC, el negre a GND.
Sensor d'humitat i temperatura DHT11
| Component | Cable | Pin |
|---|---|---|
| Sensor d'humitat i temperatura DHT11 | 3 pins / 20cm | io17 |

Pantalla LCD
| Component | Cable | Pin |
|---|---|---|
| Pantalla LCD 1602 | 4 fils agrupats (Negre-Vermell-Blau-Verd) | I2C |

Pas 6
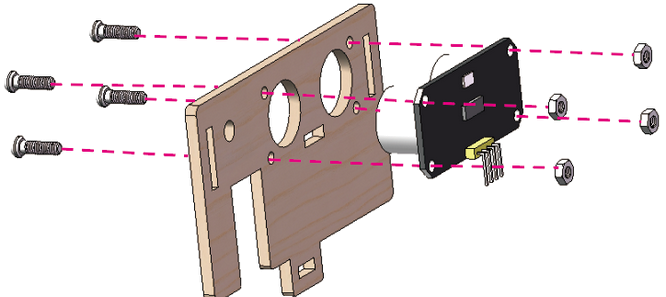
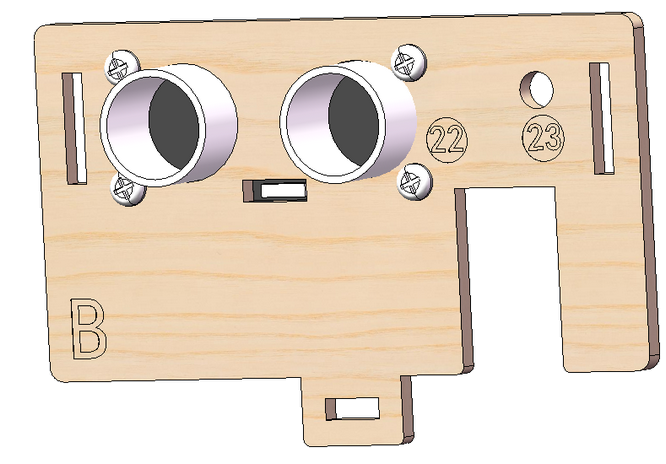
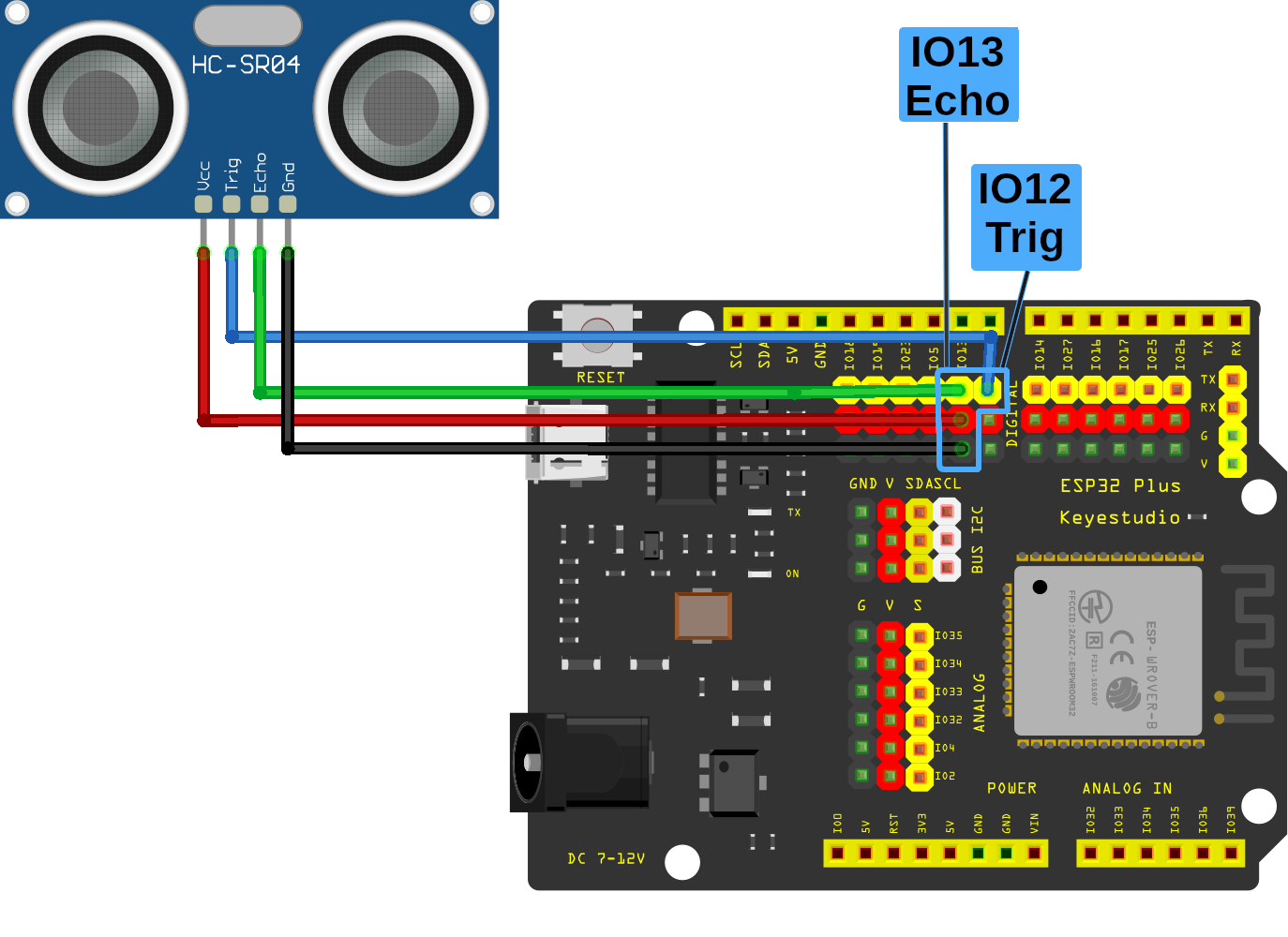
Mòdul d'ultrasons (sensor de distància)

| Component | Cable | Pin |
|---|---|---|
| Mòdul d'ultrasons | 4 pins dividits (Negre-Vermell-Verd) | io13 (ECHO) |
| Mòdul d'ultrasons | Cable Blau | io12 (TRIG) |
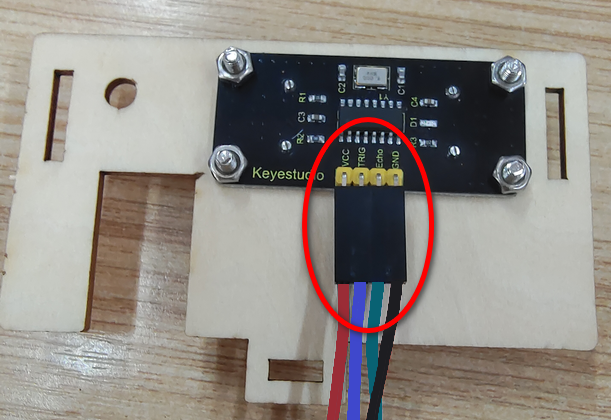
Mòdul d'ultrasons - Atenció al cablejat
El cable per a connectar el sensor d'ultrasons té terminals diferents als seus extrems:- Un únic connector amb els colors vermell, blau, verd i negre (en aquest ordre o l'invers). Aquest extrem s'ha de connectar al mòdul d'ultrasons.
Feu coincidir el terminal del cable vermell amb VCC, el del blau amb TRIG, el del verd amb ECHO i el del negre amb GND. Trobareu els indicadors VCC, TRIG, ECHO i GND serigrafiats al mòdul. - A l'altre extrem els fils estan separats:
- Connecteu el cable blau a IO12, al terminal de color groc S.
- Connecteu els tres fils restants a IO13:
el vermell al terminal vermell (V), el negre al terminal negre (G) i el cable verd al terminal groc (S).
Pas 7
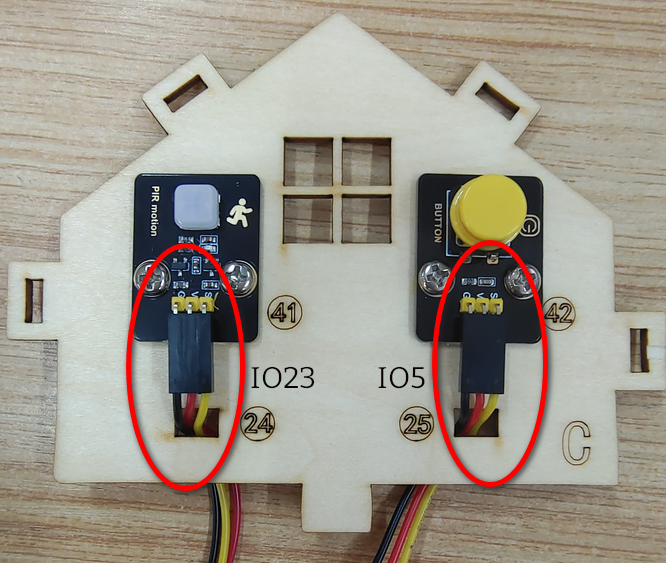
Sensor de moviment (PIR) i polsador

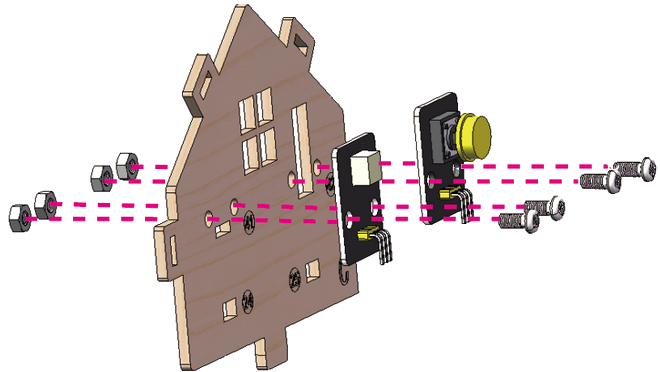

| Component | Cable | Pin |
|---|---|---|
| Sensor de moviment PIR | 3 pins / 15 cm | io23 |
| Polsador | 3 pins / 15cm | io5 |

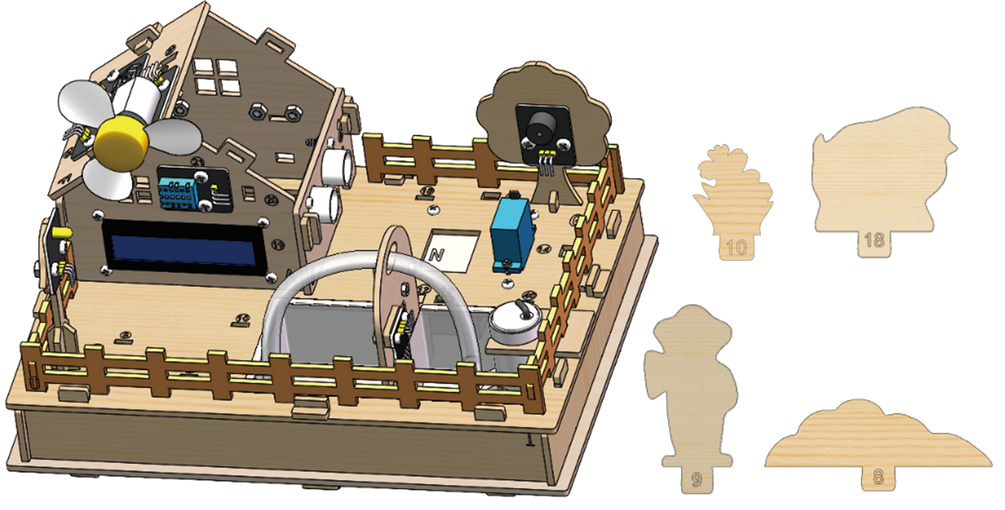
Pas 8
Pas 9
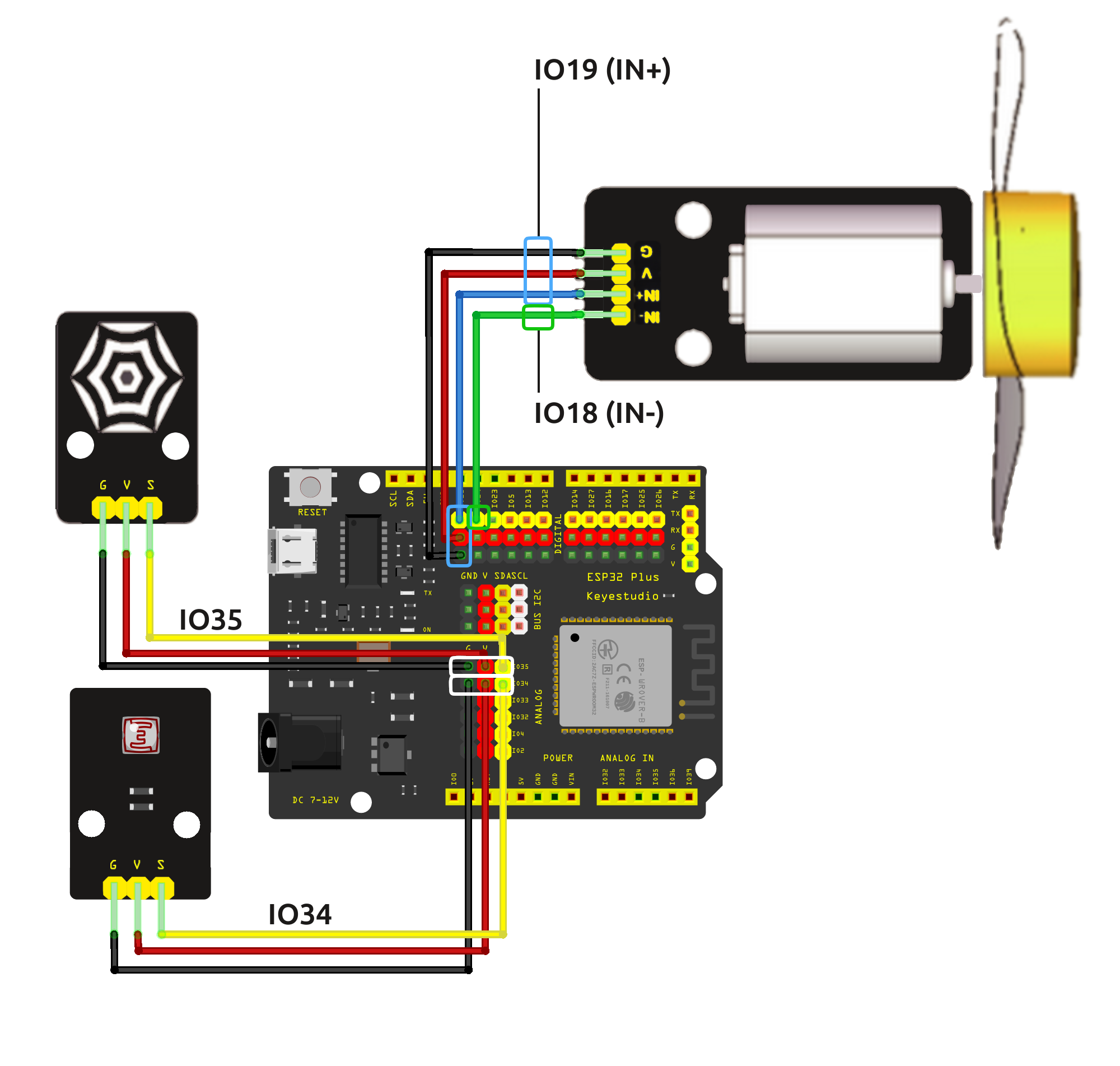
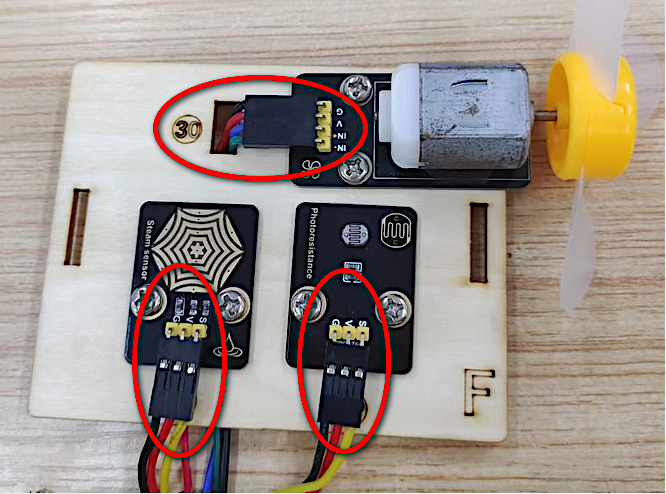
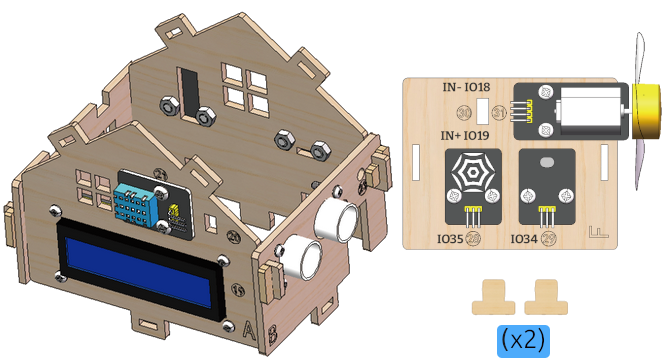
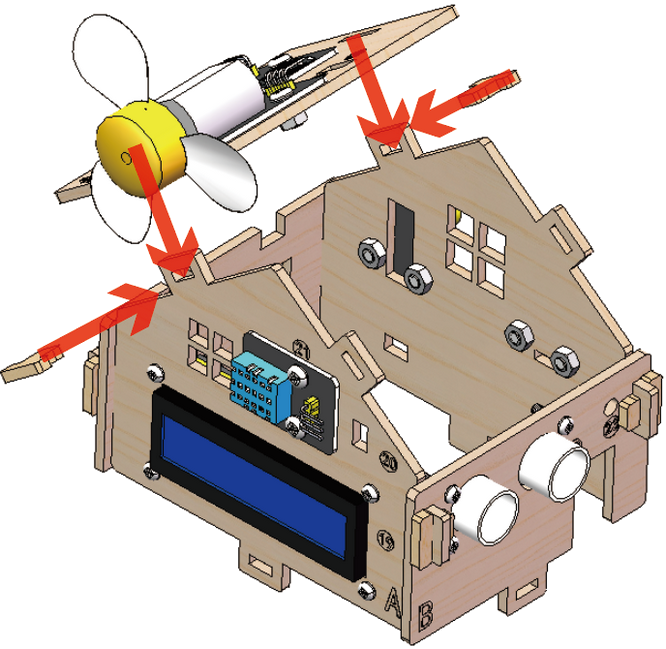
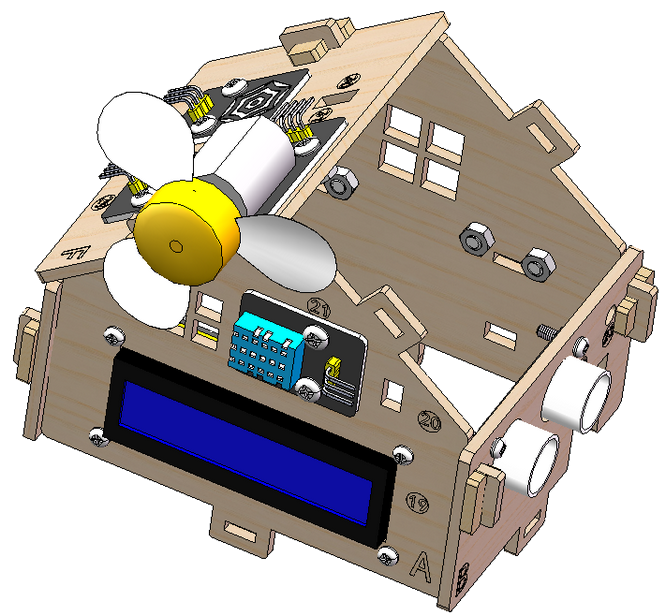
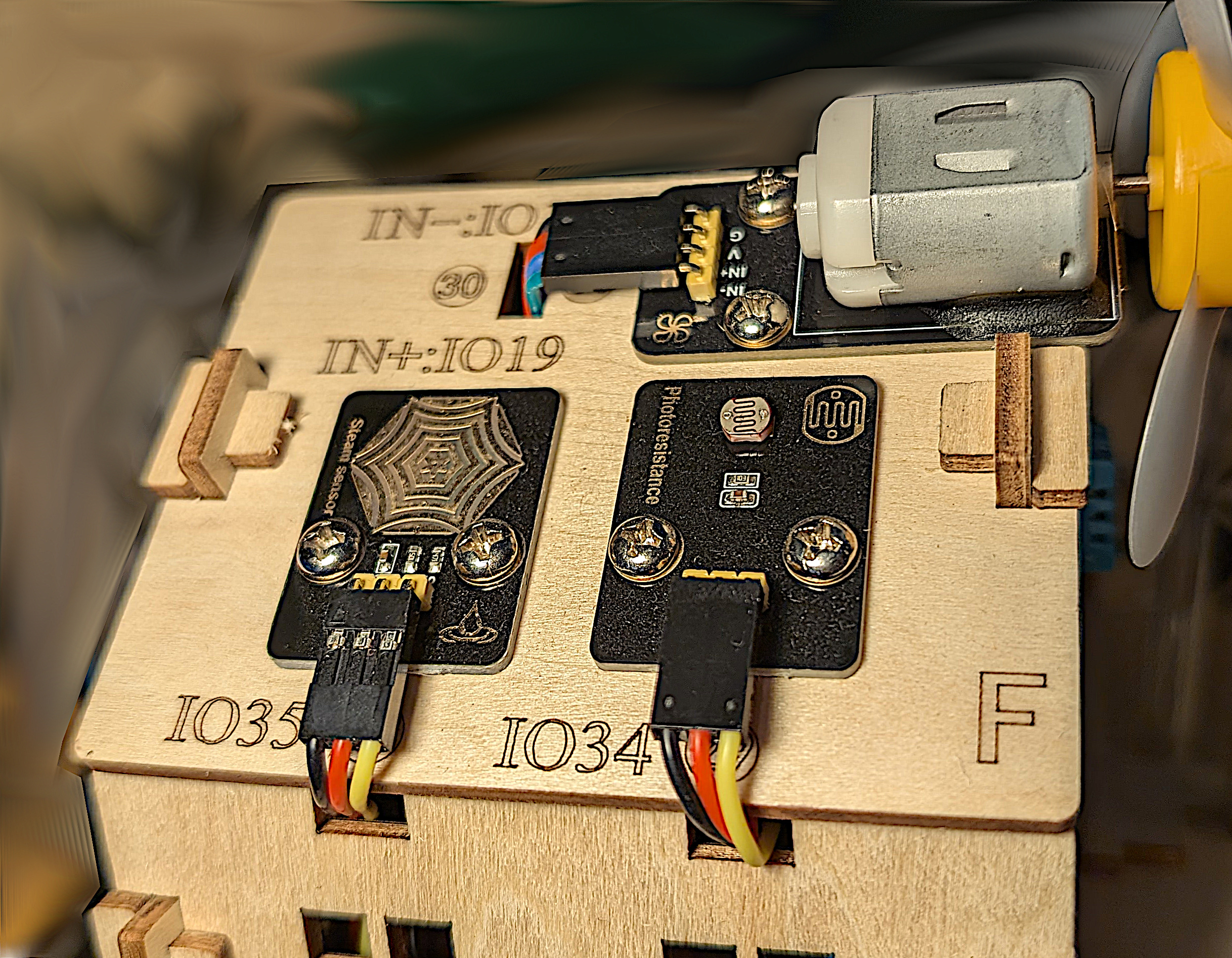
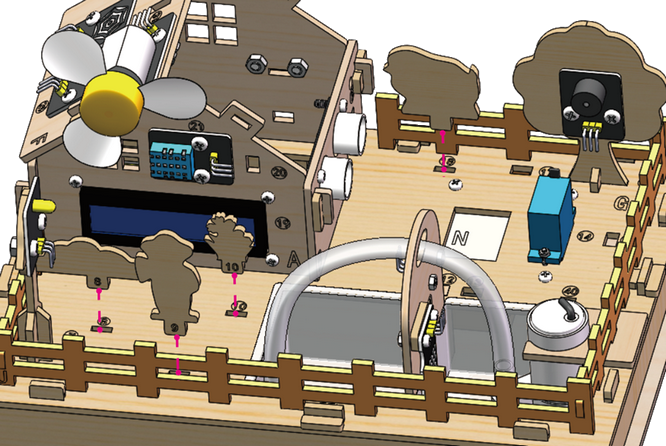
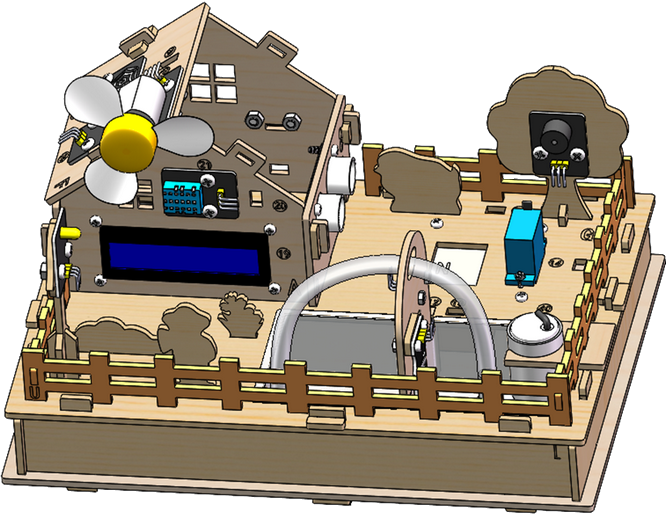
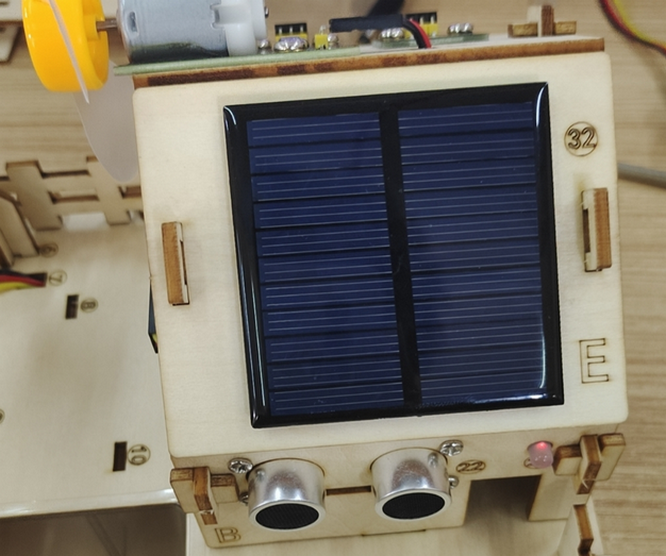
Sensor de quantitat de llum (fotoresistor), sensor de vapor i ventilador (motor)

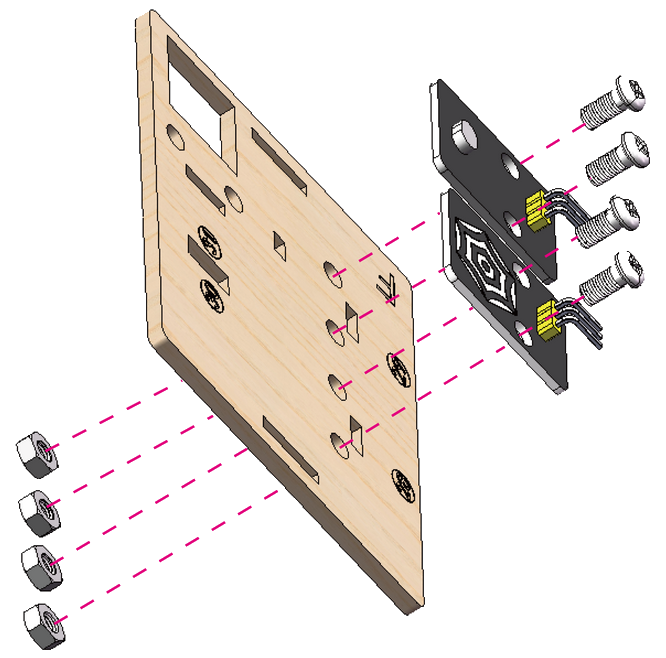
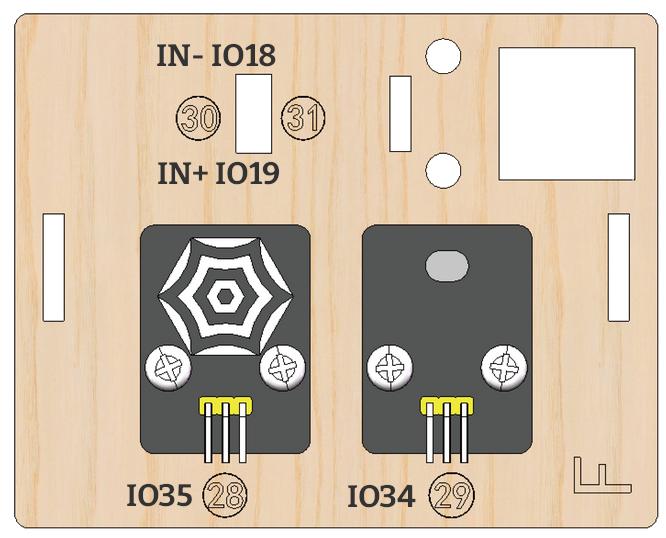

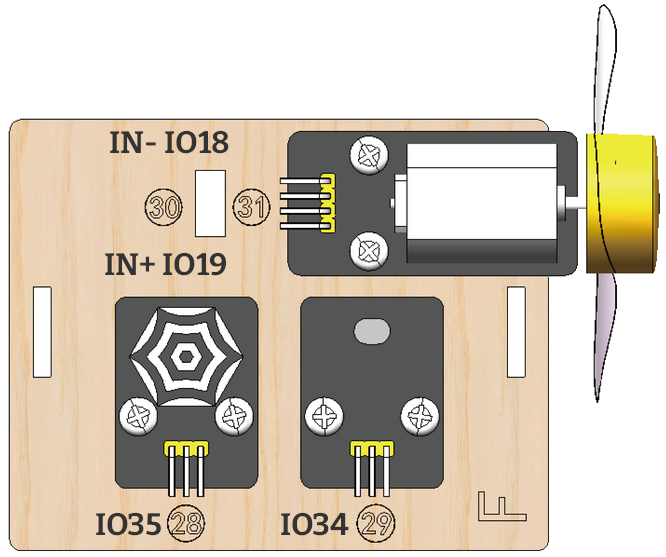
| Component | Cable | Pin |
|---|---|---|
| Motor | 4 pins extrem dividit (negre, vermell, blau, verd) | IN- io18 /IN+ io19 |
| Fotoresistor | 3 pins / 15cm | io34 |
| Sensor de vapor | 3 pins / 15cm | io35 |
Pas 10
Pas 11

Pas 12
Pas 13
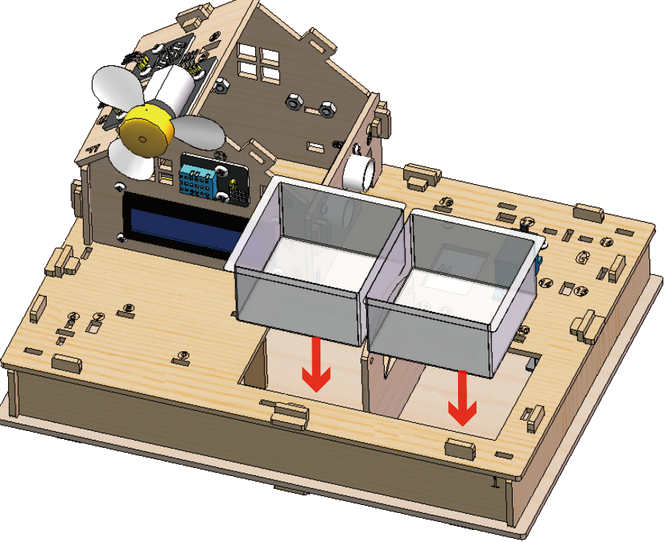
Cubetes per a l'aigua de reg i terra de l'hort
Pas 14
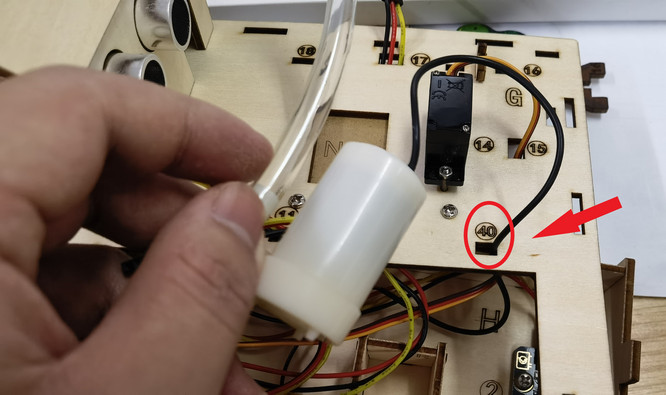
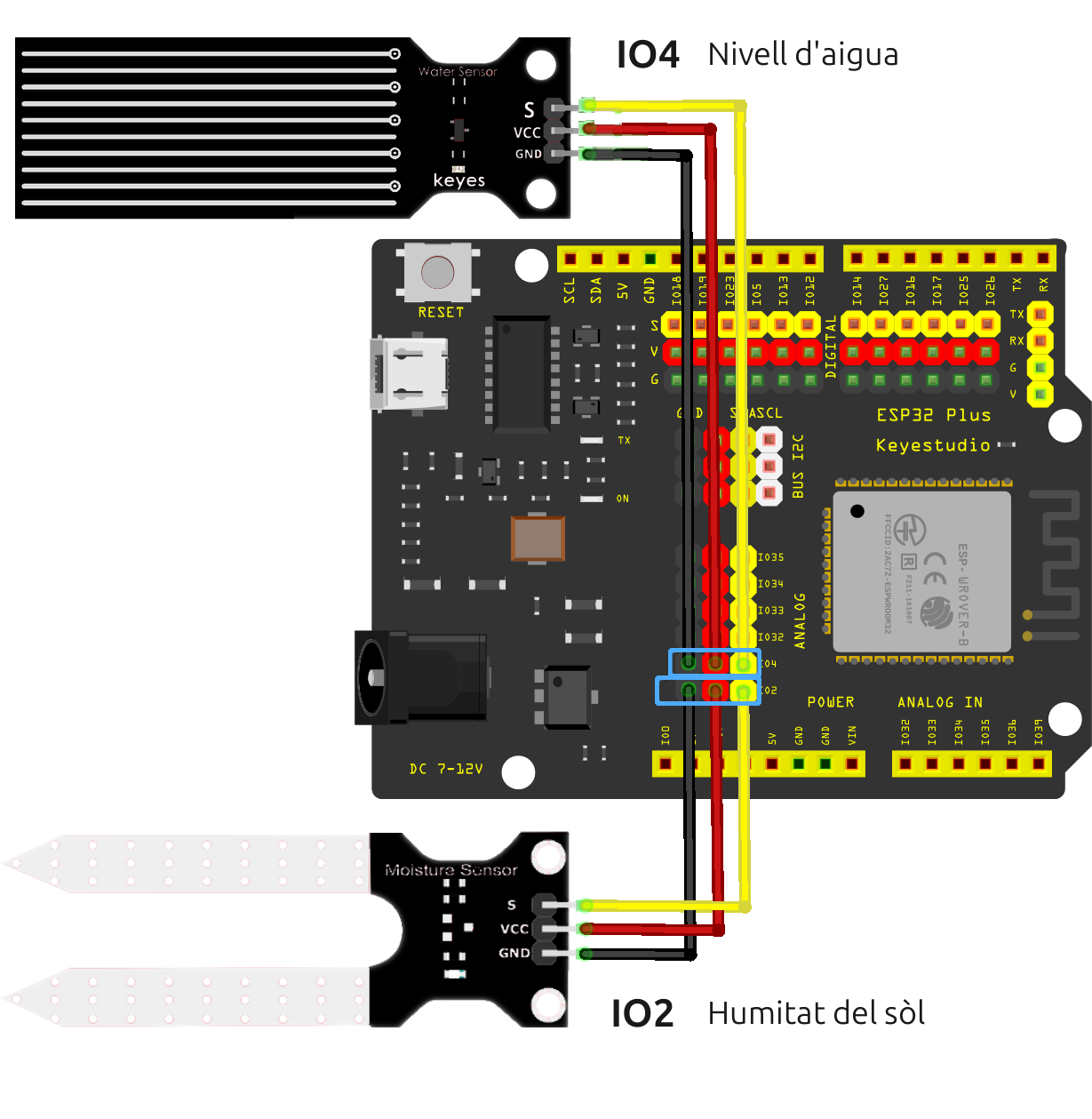
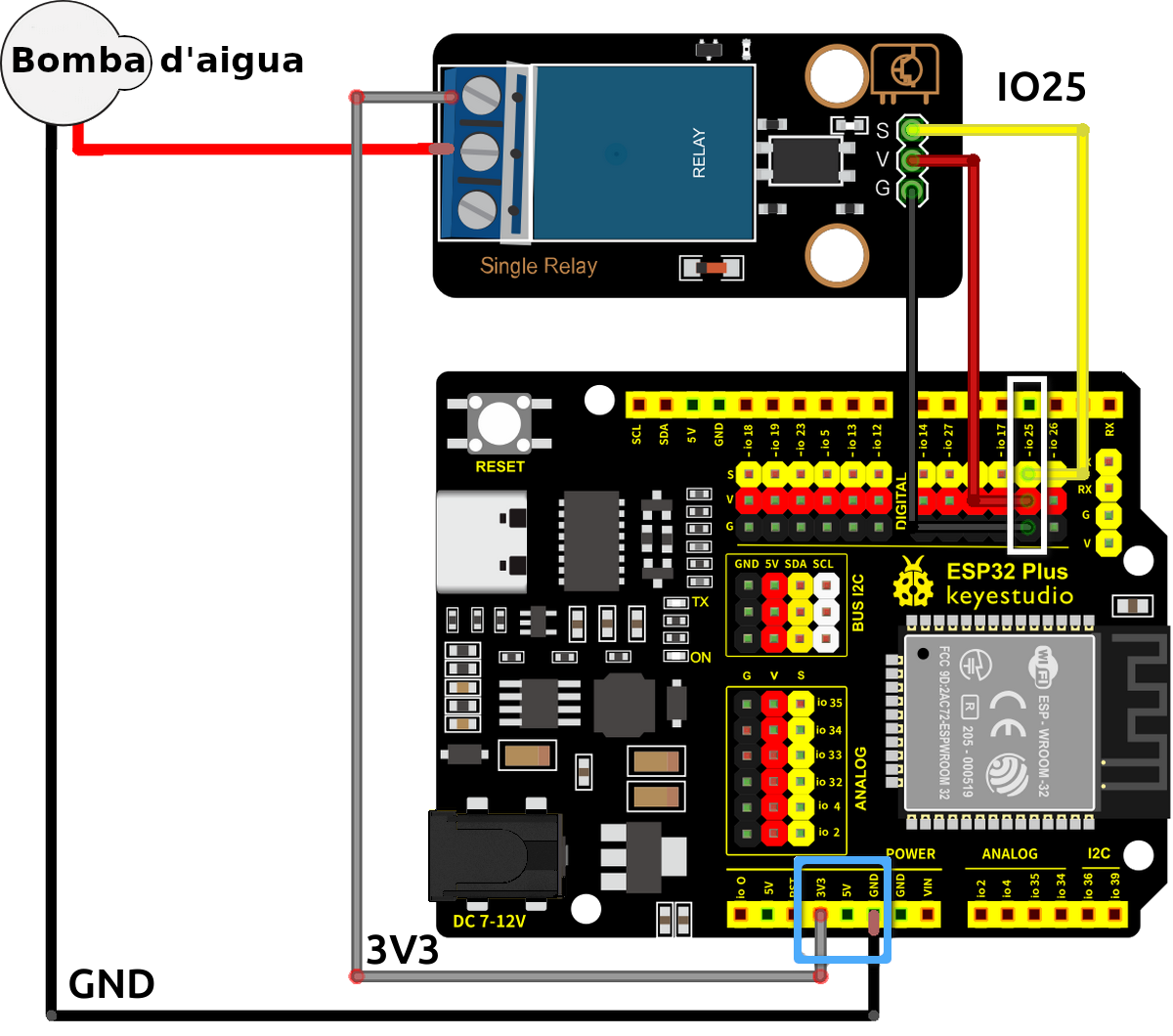
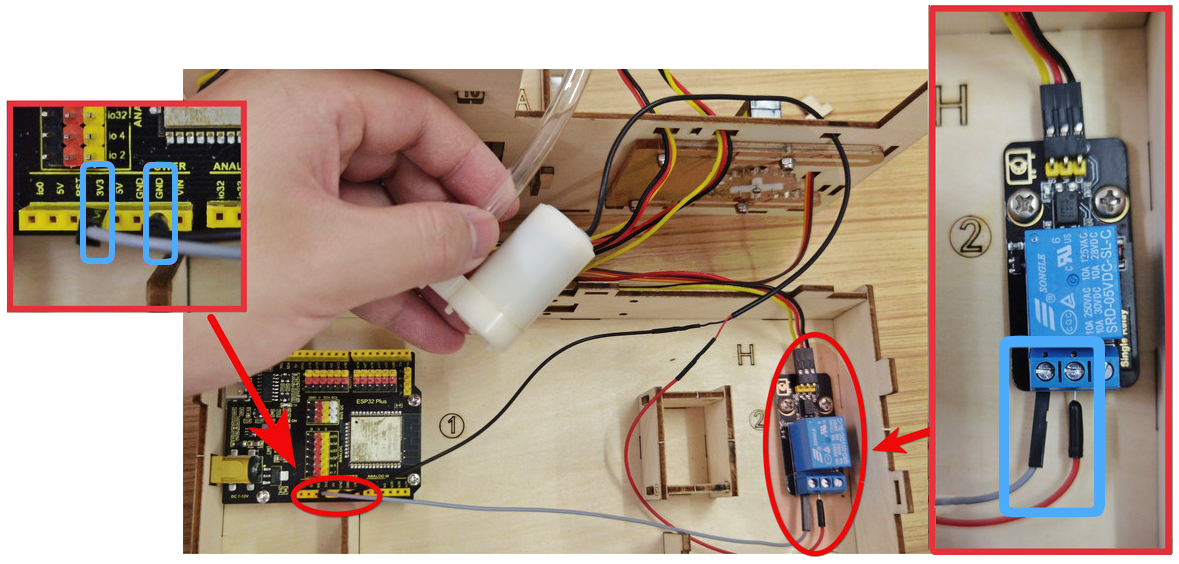
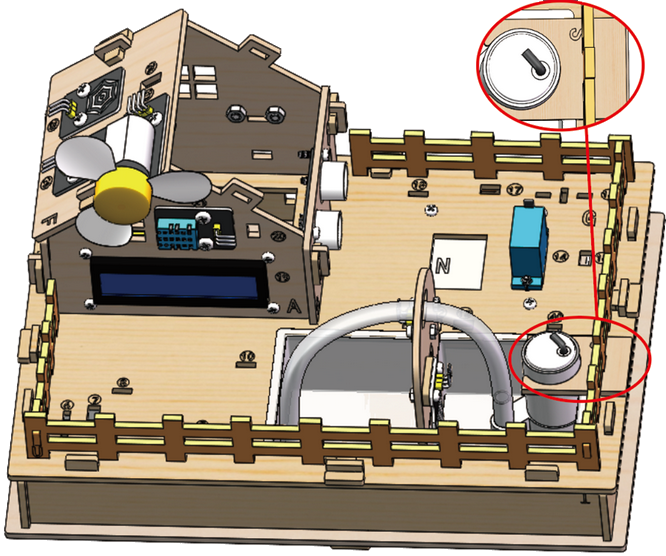
Sensors: humitat del sòl i nivell d'aigua. Bomba d'aigua
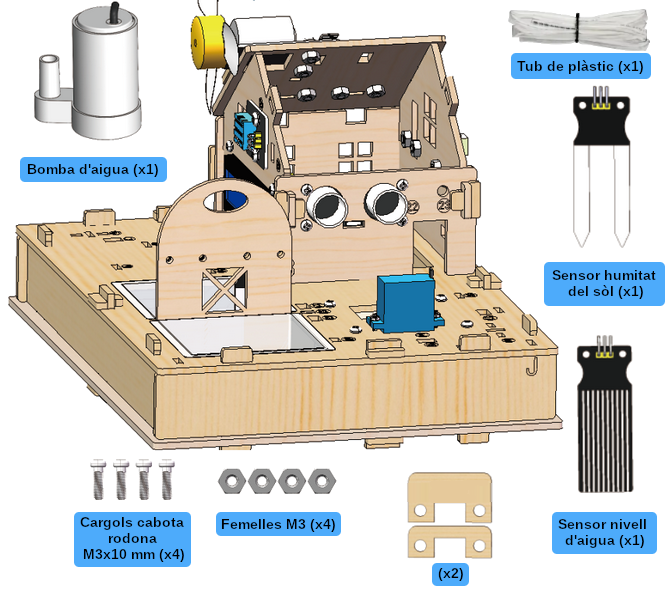
![]()
Sensors d'humitat del sòl i de nivell d'aigua

![]()
Bomba d'aigua
| Component | Cable | Pin |
|---|---|---|
| Sensor d'humitat del sòl | 3 pins / 20cm | io2 |
| Sensor de nivell d'aigua | 3 pins / 25cm | io4 |
| Relé (bomba d'aigua) | 3 pins / 20 cm | io25 |
| Bomba d'aigua | Negre / Vermell | GND / Connector comú del relé |
| Cable | Gris | Pin 3V3 a connector normalment obert del relé |
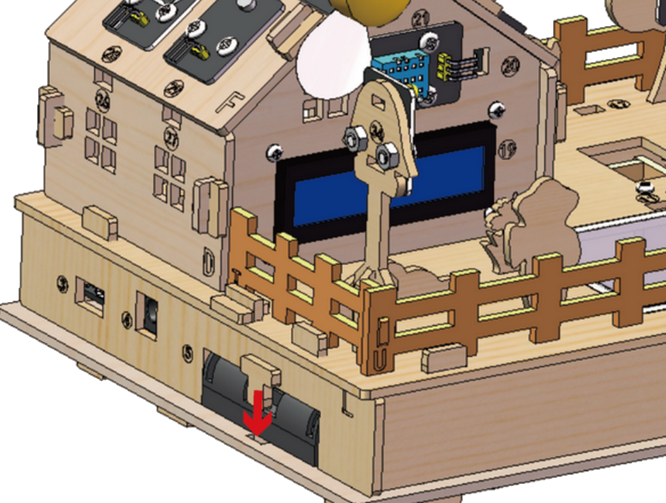
Pas 15

Pas 16
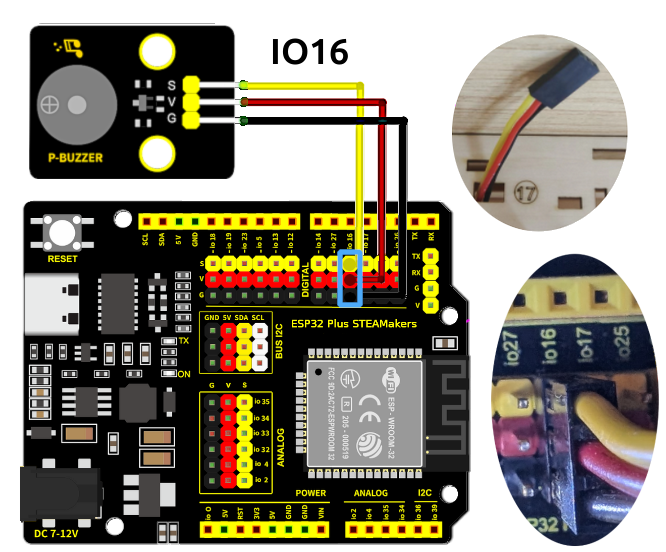
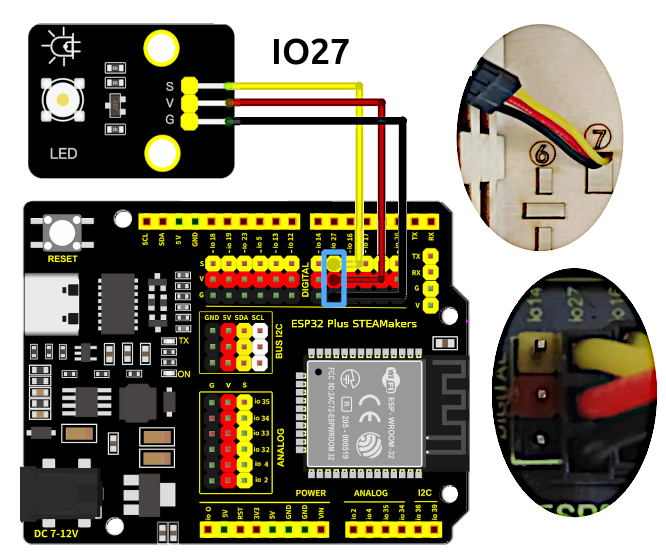
Led i brunzidor passiu
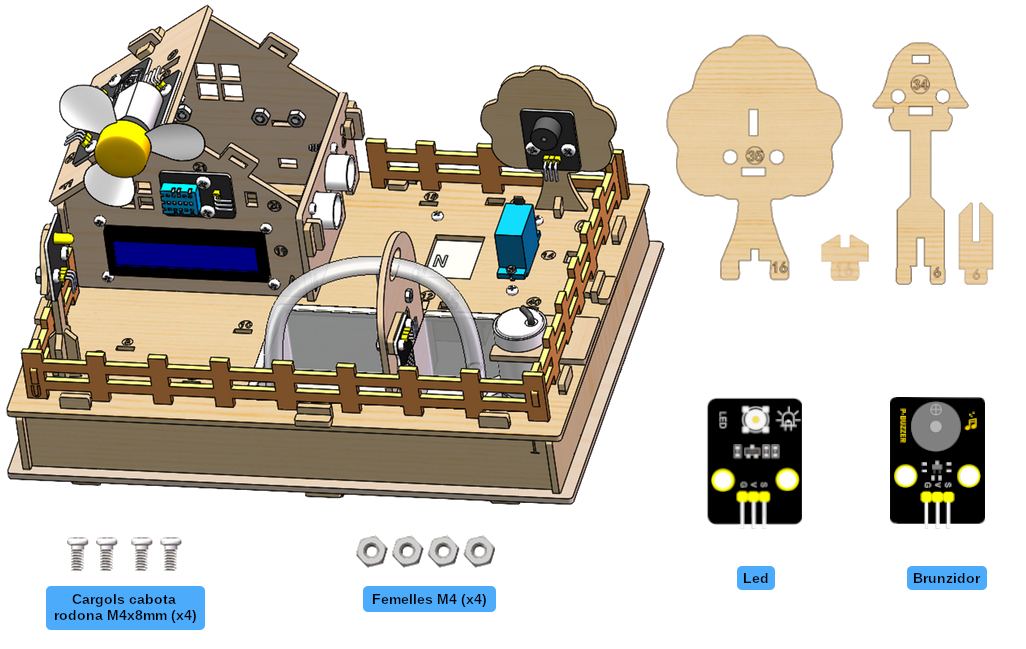


| Component | Cable | Pin |
|---|---|---|
| Brunzidor | 3 pins / 20 cm | io16 |
| Led blanc | 3 pins / 20 cm | io27 |
Pas 17
Pas 18

Pas 19
Esquema de connexions
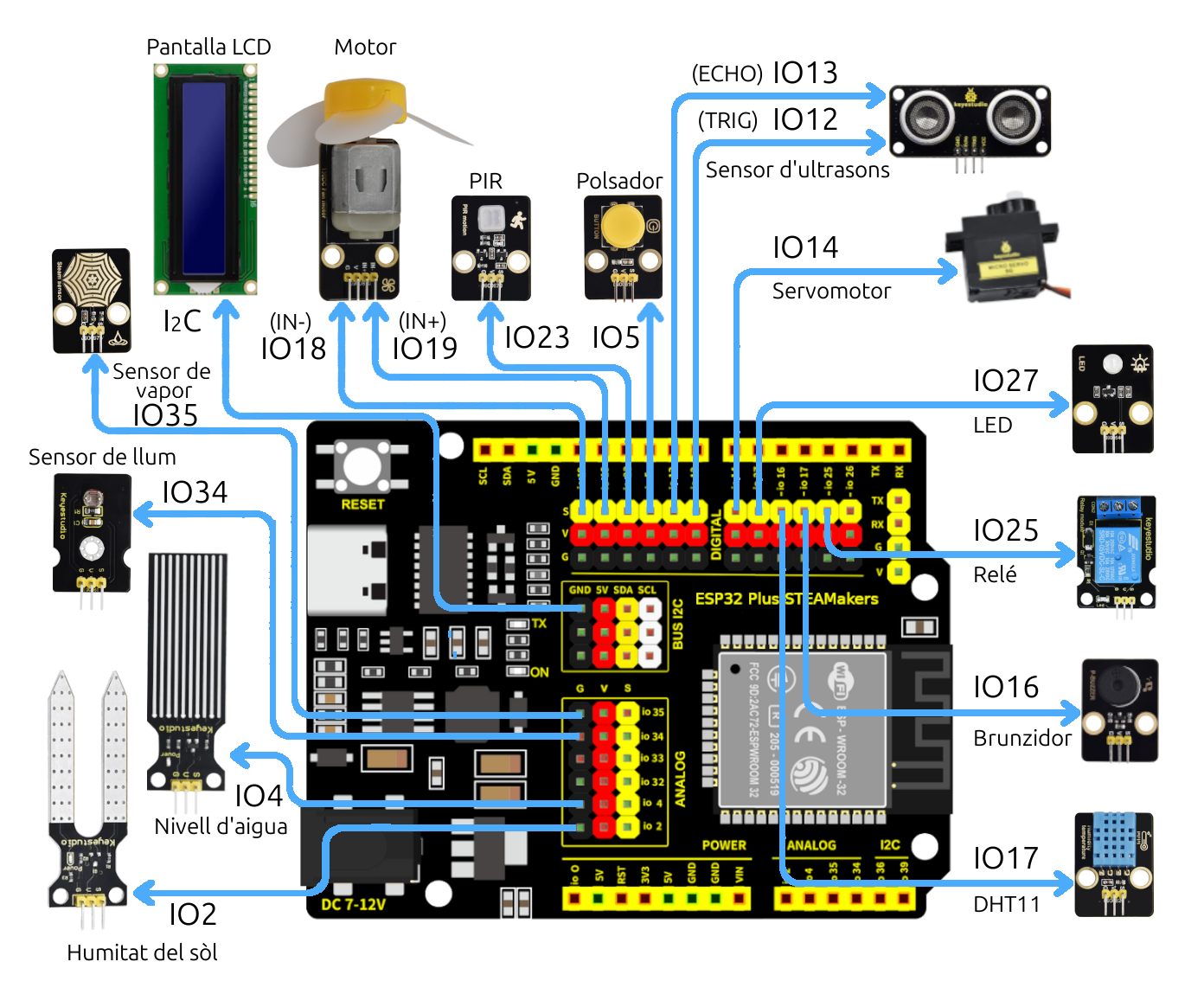
| Component | Pin |
|---|---|
| Brunzidor | io16 |
| Sensor de llum | io34 |
| Led blanc | io27 |
| Motor (ventilador) | io18(IN-) / io19(IN+) |
| Mòdul d'ultrasons | io12(TRIG) / io13(ECHO) |
| Pantalla LCD 1602 | I2C |
| Polsador | io5 |
| Relé (bomba d'aigua) | io25 |
| Sensor d'humitat del sòl | io2 |
| Sensor d'humitat i temperatura DHT11 | io17 |
| Sensor de moviment PIR | io23 |
| Sensor de nivell d'aigua | io4 |
| Sensor de vapor | io35 |
| Servomotor | io14 |