Pas 1
Pas 2
Pas 3
Pas 4
Pas 5
Pas 6

Pas 7
- Programació amb MicroBlocks
- Programació amb STEAMakersBlocks
Programació del servo
Programació amb MicroBlocks

Abans de fer servir la placa ESP32 STEAMakers amb MicroBlocks cal configurar-la.
Amb la placa connectada al port USB i a l'entorn MicroBlocks ( aquí s'explica com fer-ho), feu servir qualsevol dels mètodes següents.
Atenció
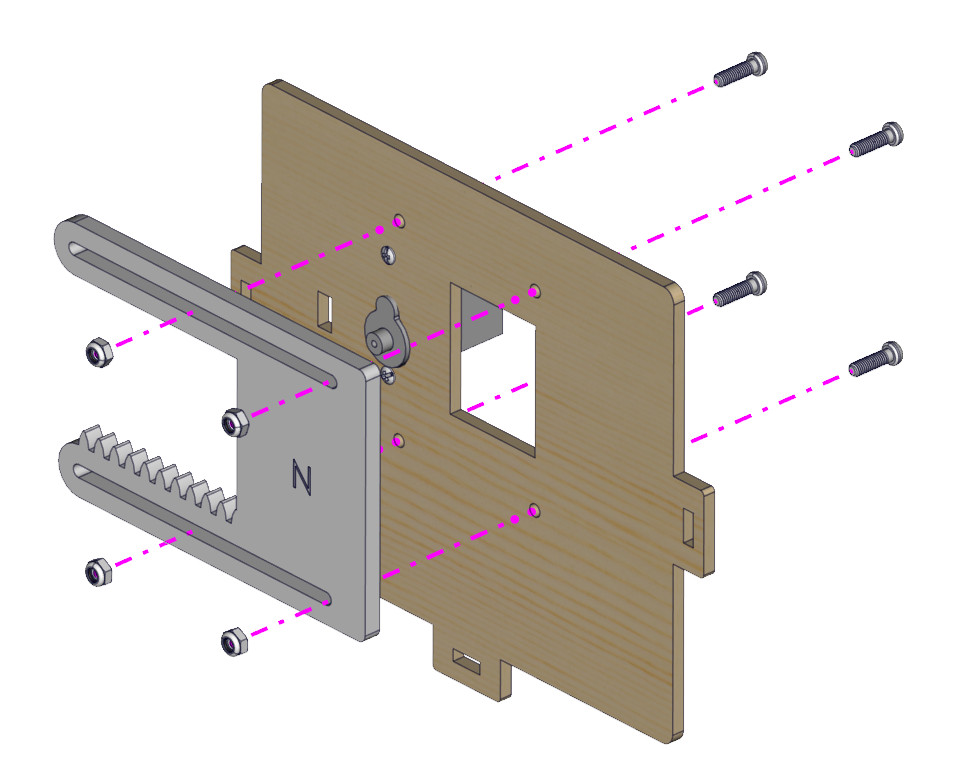
Connecteu el servomotor al pin D10 (IO05).
#Mètode 1: llibreria Servomotor
1.- Carregueu la llibreria «Servomotors» fent clic al botó Afegir llibreria. A la finestra emergent, feu doble clic a «Servomotors»:

2.- A la columna esquerra apareixerà una nova categoria: «Servomotors».
Feu-hi clic al damunt per veure els blocs que conté.
3.- Seleccioneu el bloc «posa el servo …» que es mostra a la imatge:

4.- Connecteu el servomotor al pin 5. Si feu servir un pin diferent, poseu aquest valor al primer paràmetre del bloc.
El segon és l'angle. Ha de ser «90» graus.
5.- Feu clic al bloc per posicionar el servomotor.
#Mètode 2: llibreria Smart Home
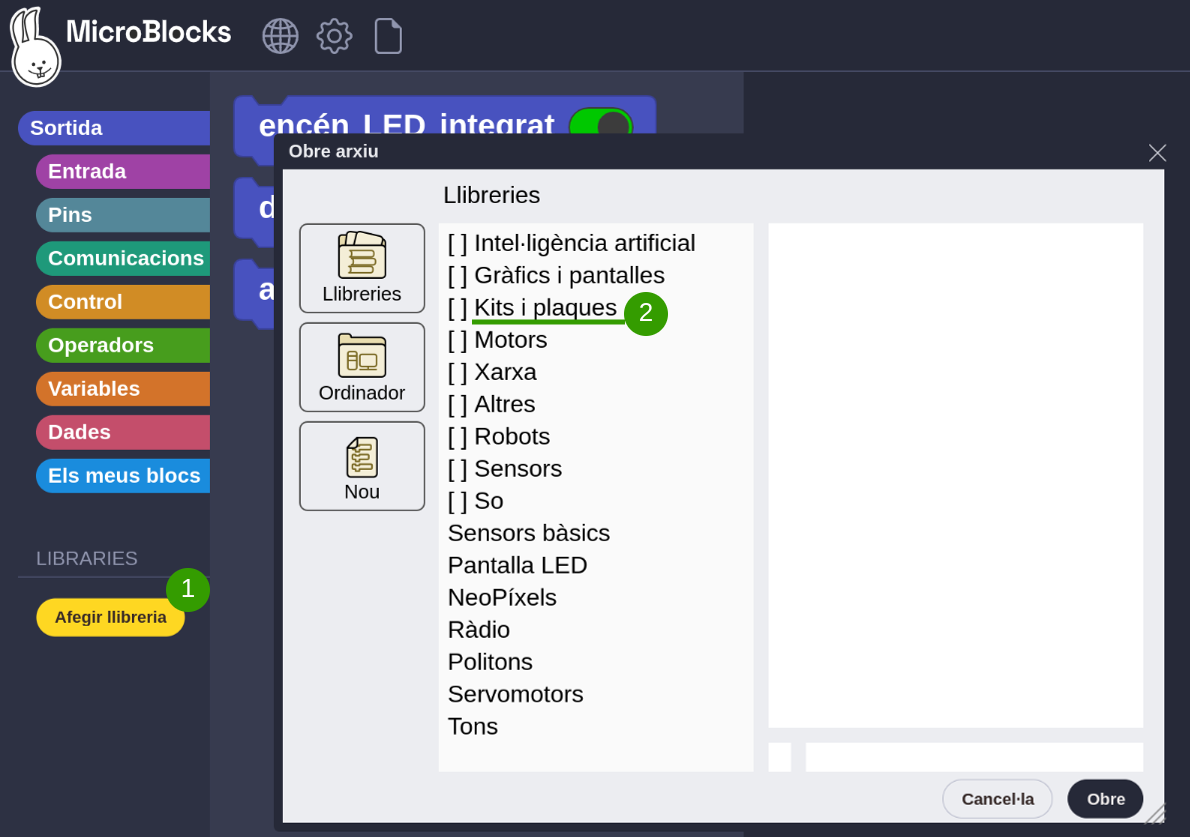
1.- Carregueu la llibreria «Smart Home»:
![]() Afegir llibreria ›
Afegir llibreria › ![]() Kits i plaques ›
Kits i plaques › ![]() Smart Home
Smart Home

2.- Busqueu el bloc
 .
.
A la llista desplegable, canvieu el valor «obre» per «tanca».
3.- Feu clic al bloc anterior per posicionar el servomotor.
Programació amb STEAMakersBlocks
![]()
Per poder establir comunicació entre l'entorn de programació Steamakersblocks i la placa, cal instal·lar i executar un programa: AB-Connector.
A l'enllaç anterior també hi trobareu instruccions per començar a utilitzar Steamakersblocks.
Elaboreu el programa següent i pujeu-lo a la placa ESP32STEAMakers per posicionar correctament el servomotor. Connecteu el servomotor al pin D10 (io05):
Atenció
Connecteu el servomotor al pin D10 (IO05).
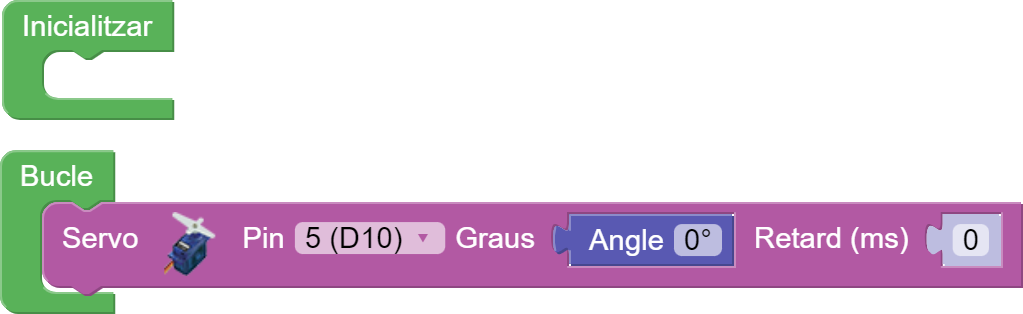
El codi del programa resultant és el següent:
#include <ESP32Servo.h> Servo servo_5; void setup() { servo_5.attach(5); } void loop() { yield(); servo_5.write(0); }
Pas 8
Pas 9
Pas 10
Pas 11
Pas 12


Pas 13


Pas 14

Pas 15

Pas 16
Pas 17

Pas 18

Pas 19

Pas 20

Esquema de connexions

| Element | PIN |
|---|---|
| Neopixel | IO26 |
| Brunzidor | IO25 |
| DHT11 | IO17 |
| Polsador 1 | IO16 |
| Polsador 2 | IO27 |
| PIR | IO14 |
| LED | IO12 |
| Servomotor 2 | IO13 |
| Servomotor 1 | IO5 |
| Sensor de gas | IO23 |
| Ventilador | IO19 i IO18 |
| Sensor de vapor | IO34 |
| LCD | BUS I2C |
| RFID | BUS I2C |