A16. Comunicación Bluetooth
En la placa de control del robot KEYBOT tenemos un conector para colocar el módulo de comunicaciones Bluetooth. También dispone de un pequeño interruptor para poder abrir o cerrar este puerto de comunicaciones, puesto que está conectado a los pines D0 y D1 (Rx/Tx) al igual que puerto de comunicaciones del ordenador (USB).
Estado del interruptor:
- OFF: transmisión del programa desde ArduinoBlocks
- ON: funcionamiento en mode Bluetooth
A16.1. AppInvetor2
Primero deberemos crear una cuenta en AppInventor2 a través del siguiente enlace: AppInventor2
Una vez creada la cuenta procederemos a realizar la programación, tanto con “Designer” como con “Blocks”. A continuación, se muestran los dos programas de ejemplo.

- Designer

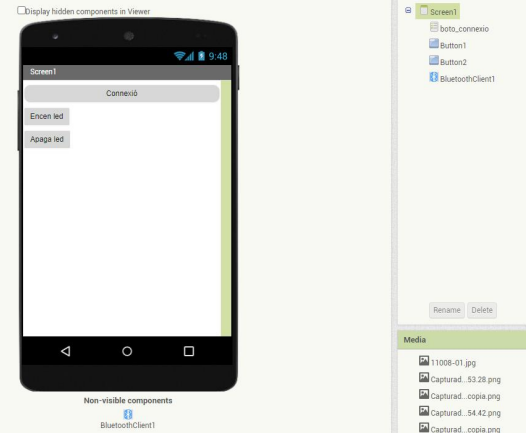
- Blocks


A16.2. ArduinoBlocks
A continuación, procederemos a realizar el programa en ArduinoBlocks y que irá en el KEYBOT.

Cuando tenemos preparados los dos programas, seguiremos los siguientes pasos:
- Enviar el programa de ArduinoBlocks al robot KEYBOT
- Instalar la aplicación en el teléfonn móvil
- Sincronizar el Bluetooth del móvil con el módulo Bluetooth del robot
- Probar el programa
Activaremos el módulo Bluetooth del teléfono móvil.

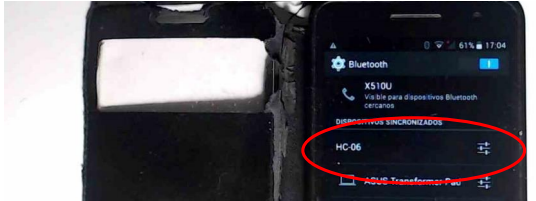
Abriremos el servicio Bluetooth del móvil y buscaremos el nuevo dispositivo. Aparecerá un dispositivo llamado HC-06.

Escogeremos este módulo e introduciremos la contraseña: 1234 (opcionalmente puede ser 0000).
Ya tendríamos sincronitzado los dos dispositivos Bluetooth.
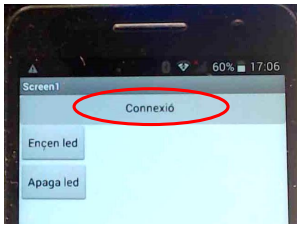
A continuación, abriremos la aplicación (en este caso se llama “Bluetooth”).

Pulsaremos el botón “Conexión” para poder realizar la conexión (las letras salen de color negro, cuando se conecte cambiarán de color). Recuerde que el interruptor de comunicaciones estará en ON en el robot.
Escogeremos nuestro módulo Bluetooth (mediante la dirección MAC):

Ara las letras del botón “Conexión” aparecerán de color azul.
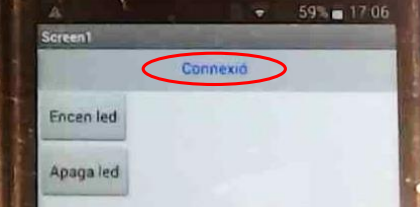
Y el led rojo del módulo Bluetooth quedará fijo.

Si pulsamos el botón “Enciende led” se encendrá el led y si pulsamos “Apaga led” se apagará.
Actividad de ampliación: realiza un programa que permita controlar más elementos del robot. Aparte de controlar el led, que se pueda controlar que el robot se detenga, vaya hacia delante y hacia atrás.
Solución:

