A05. Comunicación serie (Consola)
En esta práctica probaremos el funcionamiento de la comunicación entre el robot KEYBOT y el ordenador. ArduinoBlocks dispone de una “Consola” para poder ver la comunicación. Esta función es muy útil porque nos permite consultar valores (como los de los sensores) en el KEYBOT.
Haremos un programa en el que enviaremos un mensaje de texto “Robot KEYBOT” y el valor de una variable que se vaya modificando entre 0 y 255 cada 20ms.
Primero configuraremos la velocidad de comunicaciones. Abriremos en el panel de bloques “Port serie” y elegimos “Inicia Bauds 9600”.
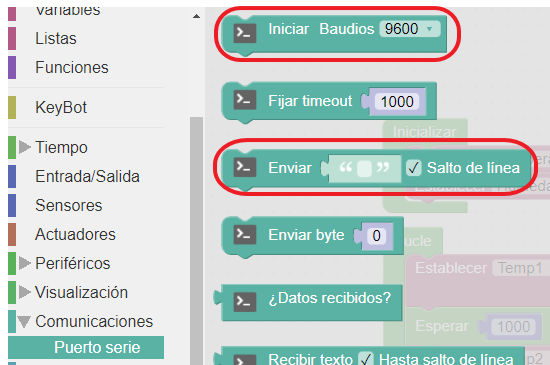
Lo pondremos dentro de “Inicializar”. Ahora escogeremos el bloque “Enviar” para añadir el texto a dentro de las comillas.

Ahora añadiremos los bloques de la variable de conteo. Crearemos una variable añadiendo el bloque “Establecer varNum=x”.
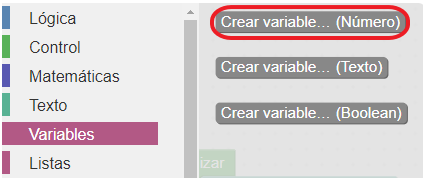
Después crearemos una “Variable nueva…” y le daremos el nombre de “valor”. Y los contadores cambiaremos la variable.
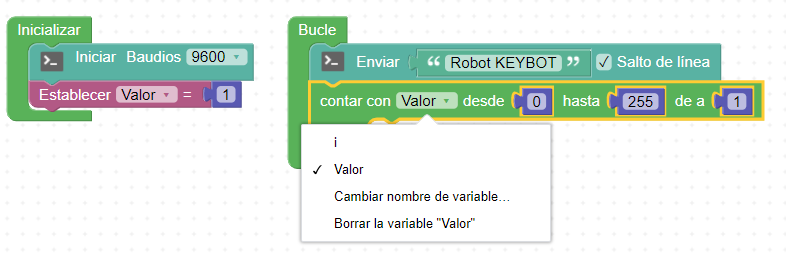
Por último, añadiremos el bloque para enviar el valor y el tiempo de espera. El programa quedará de la siuiente manera:

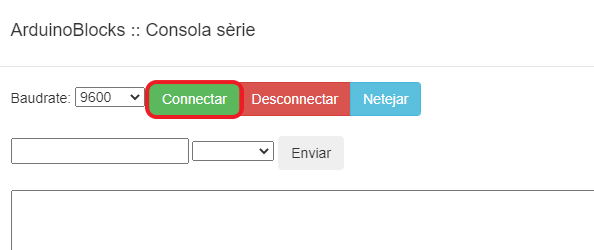
Ahora subimos el programa al robot y abrimos la “Consola”.

En el menú que aparece pulsamos en “Conectar”.
Ya podemos ver los datos:

Actividad de ampliación: modifica el programa envíe los datos de una variable que se llama “Distancia”, que el contador se incremente de 5 en 5 y que el tiempo de espera sea de 50ms. Nota: puedes “Renombrar la variable” para ahorrar tiempo.
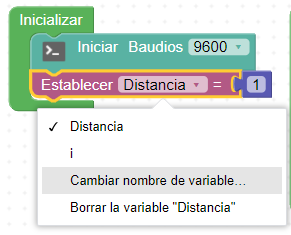
Solución:

