Guía de montaje
A continuación, procederemos a realizar los pasos de montaje del robot KEYBOT de forma muy resumida y gráfica (hay un manual de instrucciones en el kit de robot).
Muy importante tener en cuenta que existe un problema con el Manual de usuario que viene en el kit, ya que hay un paso mal. Los motores deben colocarse después de instalar el soporte de las pilas, ya que si no se hace así no se pueden poner los tornillos para sujetar el soporte.
Es conveniente para poder apretar las hembras de utilizar unas alicates y, opcionalmente, se pueden sustituir las hembras que vienen en el kit por hembras autoblocantes.
 |  |
|---|---|
| Alicates de punta | Hembra autoblocante |
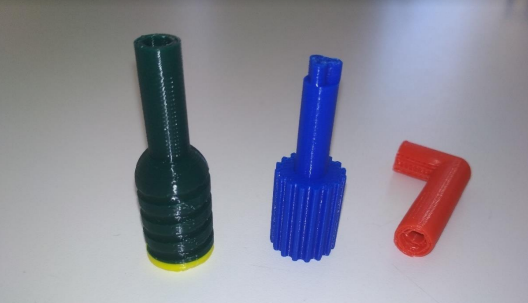
También se pueden utilizar herramientas propias, en este caso estas hechas en 3D.

Pasos a seguir en el proceso de montaje:
- Paso 1: Montaje de la estructura.
- Paso 2: Colocación del sensor de ultrasonidos.
- Paso 3: Ahora instalaremos los sensores del seguidor de línea y la rueda de acero.
- Paso 4: Instalación del soporte de las baterías 18650.
- Paso 5: Instalación del soporte de las baterías AA.
- Paso 6: Montaje de los motores.
- Paso 7: Colocación de las ruedas.
- Paso 8: Colocaremos la placa de control a la estructura del robot.
- Paso 9: El siguiente paso es instalar el protector acrílico de la placa de control.
- Paso 10: Conexión de los sensores y actuadores.
- Paso 11: Instalación del kit de ampliación.
En el robot hay un manual de montaje. Hay un error en el procedimiento, ya que si se montan los motores al principio después deben quitarse para montar el soporte de las baterías.
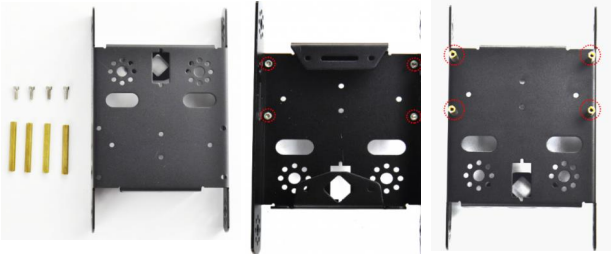
Paso 1: Montaje de la estructura.
- 1 un. Estructura del robot
- 4 un. Tornillo hexagonal M3x8mm
- 4 un. Separador de cobre doble paso M3x40mm
Paso 2: Colocación del sensor de ultrasonidos.
- 2 un. Tornillo hexagonal de acero inoxidable M3x8mm
- 2 un. Hembra niquelada M3
- 1 un. Sensor de ultrasonidos

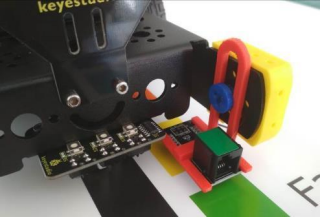
Paso 3: Ahora instalaremos los sensores del seguidor de línea y la rueda de acero.
- 2 un. Tornillo hexagonal de acero inoxidable M3x10mm
- 2 un. Hembra niquelada M3
- 1 un. Módulo sensor de líneas
- 1 un. Rueda de acero W420

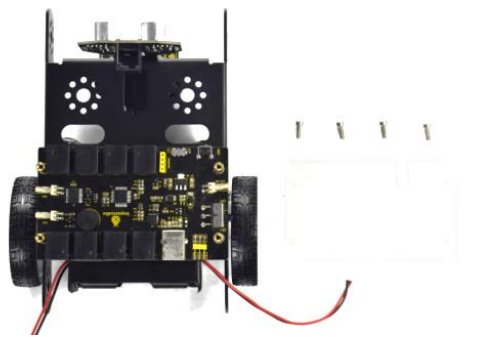
Paso 4: Instalación del soporte de las baterías 18650.
- 2 un. Tornillo de cabeza plana M3x8mm
- 2 un. Hembra niquelada M3
- 1 un. Soporte baterías 18650


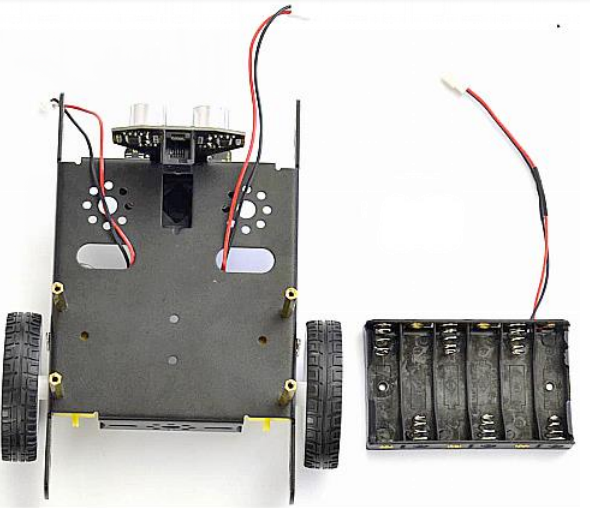
Paso 5: Instalación del soporte de las baterías AA.
- 2 un. Tornillo de cabeza plana M3x8mm
- 2 un. Hembra niquelada M3
- 1 un. Soporte baterías AA
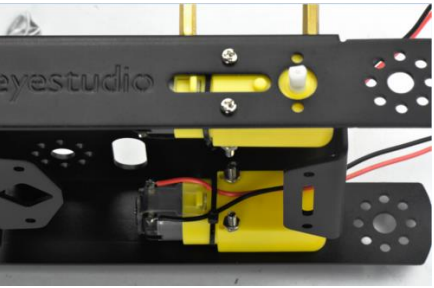
Paso 6: Montaje de los motores.
- 2 un. Motor reductor
- 4 un. Tornillo de cabeza redonda M3x30mm
- 4 un. Hembra niquelada M3

Paso 7: Colocación de las ruedas.
- 2 un. Rueda 6515

Paso 8: Colocaremos la placa de control a la estructura del robot.
- 4 un. Separador de cobre M3x15mm
- 1 un. Placa de control Keybot Control Board

Paso 9: El siguiente paso es instalar el protector acrílico de la placa de control.
- 4 un. Tornillo hexagonal de acero inoxidable M3x10mm
- 1 un. Panel superior acrílico

Instalación del kit de ampliación
A continuación, mostraremos cómo instalar el kit de ampliación. Este kit consta de:
- Hub I2C
- Sensor de colores
- Pantalla OLED
- Matriz 8×8
- Servomotor
- Sensor DHT22
- Accesorios impresos en 3D para sujetar los elementos anteriores
- Cables RJ11
- Módulo Wifi
Paso 10: Conexión de los sensores y actuadores.

Proceso de montaje de los elementos 3D:
- Éstas son las herramientas que puede utilizar para montar el robot.

- Montaje del sensor de color.
- Montaje del Hub I2C.
- Montaje de la matriz de leds.

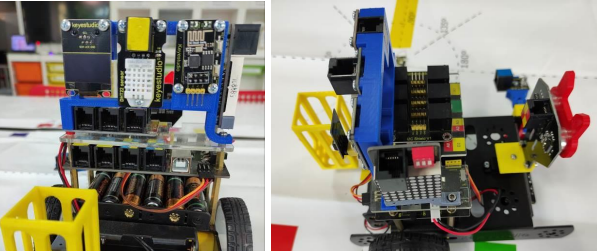
- Colocación de la pantalla OLED + Sensor DHT22 + Módulo Wifi.
- Montaje del portabatería.
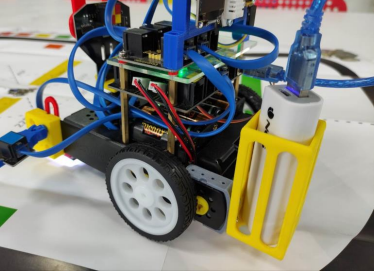
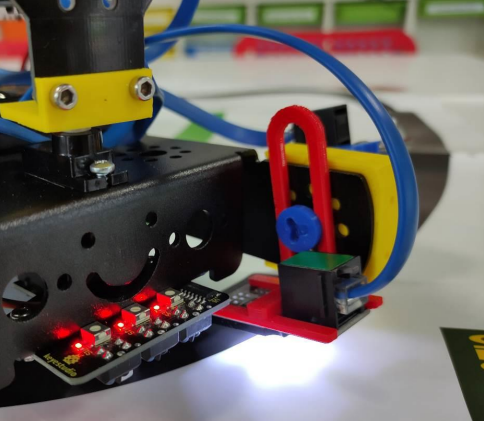
- Montaje del soporte del led.
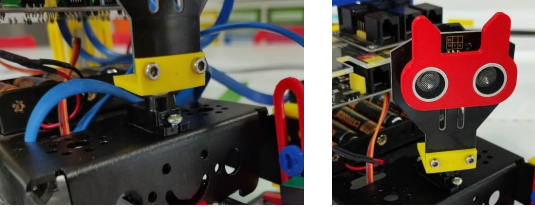
- Montaje de la cara (servomotor + sensor ultrasonidos).
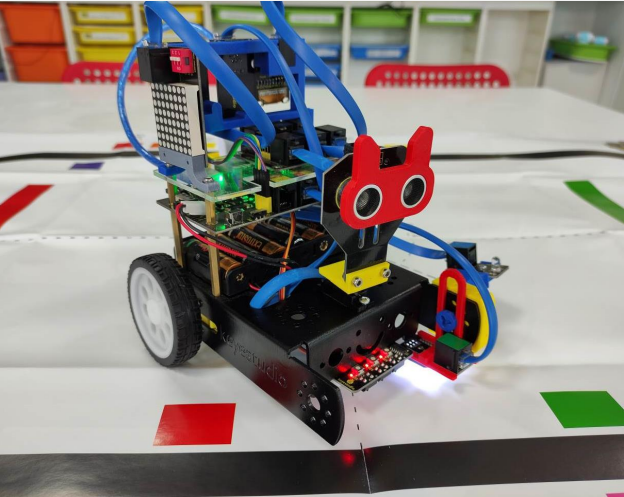
- Robot montado! Tardarás una media hora (aproximadamente).
Guía de conexión
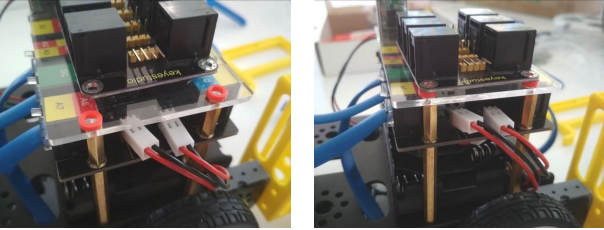
Ahora procediremos a realizar la conexión del cableado. Haremos las conexiones tal y como indica la tabla del apartado 4. Conectaremos con los cables RJ11 los sensores y actuadores de color verde y el resto con sus conectores corresponendientes.
El módulo Bluetooth o el módulo Wifi los conectaremos directamente a la placa de control. Deberemmos poner el interruptor asociado al módulo en la posición OFF para poder enviar el programa a la placa. Debemos tener cuidado a la hora de conectar el módulo Wifi y fijarnos con las conexiones, ya que debemos hacerlas con cables Dupont.
La placa Hub I2C permite conectar dispositivos I2C. Aquí conectaremos el sensor de colores, la pantalla OLED i la matriz 8×8.
Paso 11: Conexión de los sensores y actuadores.
El servomotor va al conector de la parte superior (más separado de la placa).
El Hub I2C se conecta al conector I2C de la placa (A4/A5) desde cualquier conector de la placa y el resto de componentes se conectan al resto de conectores del hub.
Esquema de conexiones:
