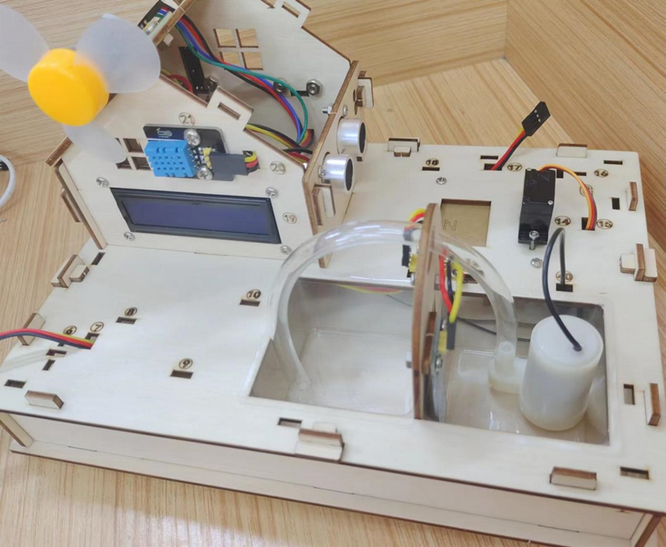
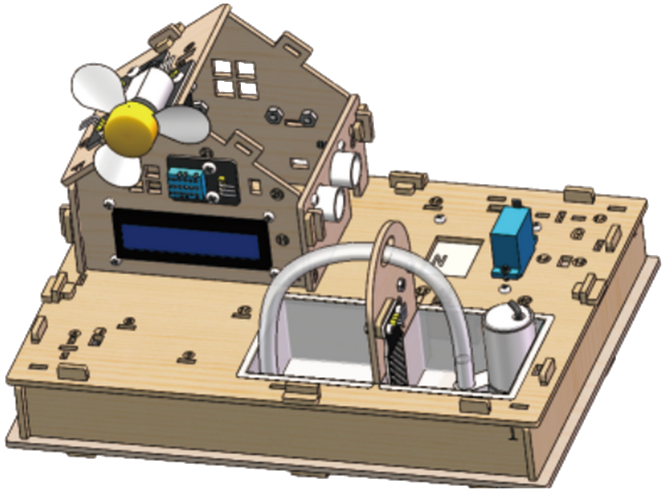
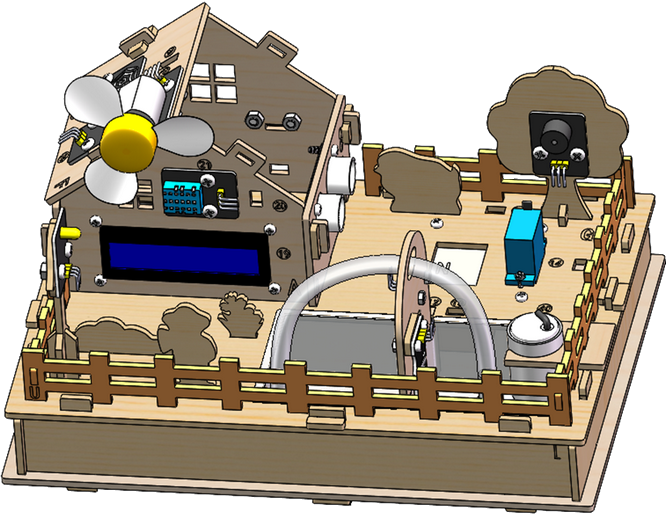
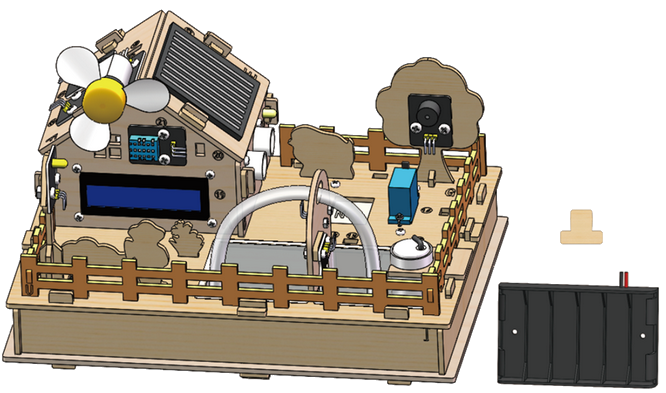
El montaje se puede dividir en dos partes: montaje de las piezas y componentes y el conexionado de los elementos electrónicos.
Conexionado de los elementos electrónicos

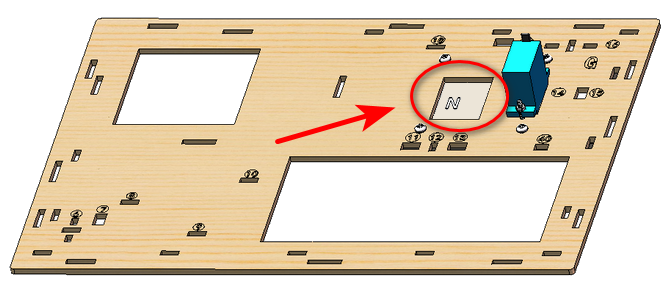
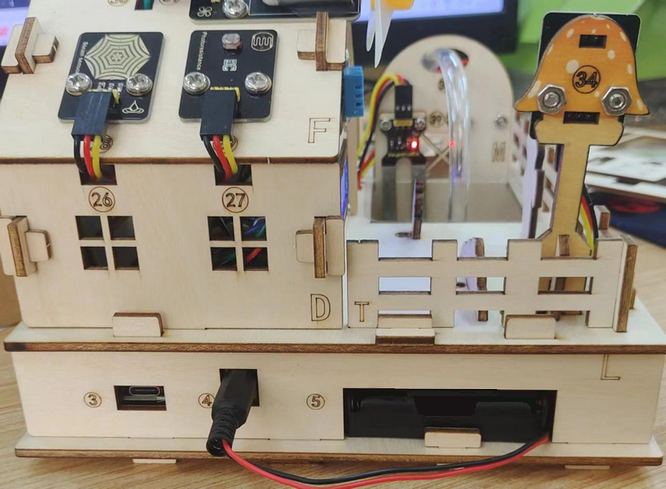
Los componentes electrónicos llevan serigrafiadas estas letras junto a los pines metálicos de conexión.
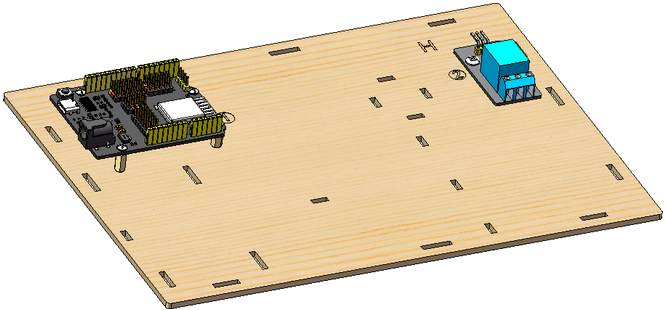
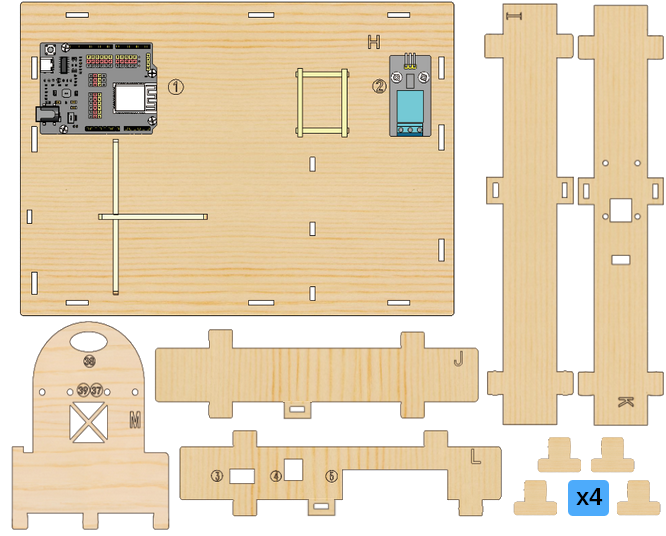
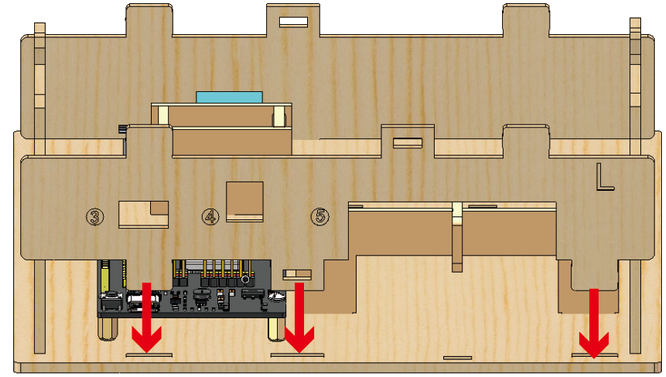
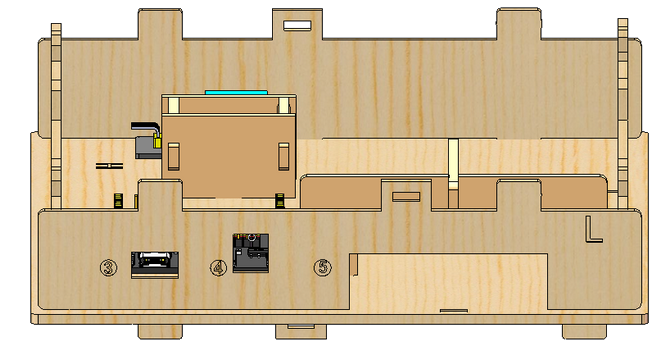
Paso 1
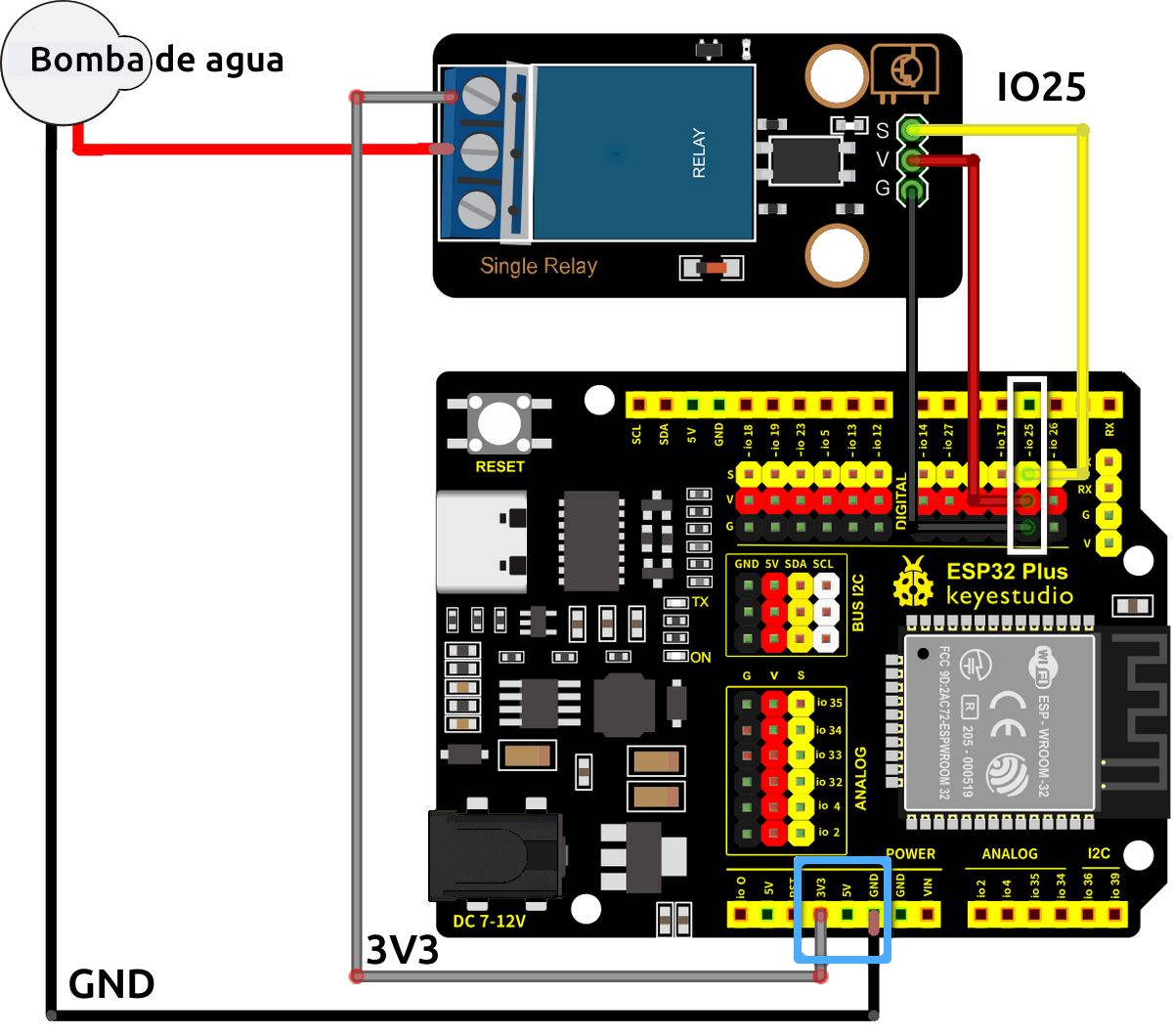
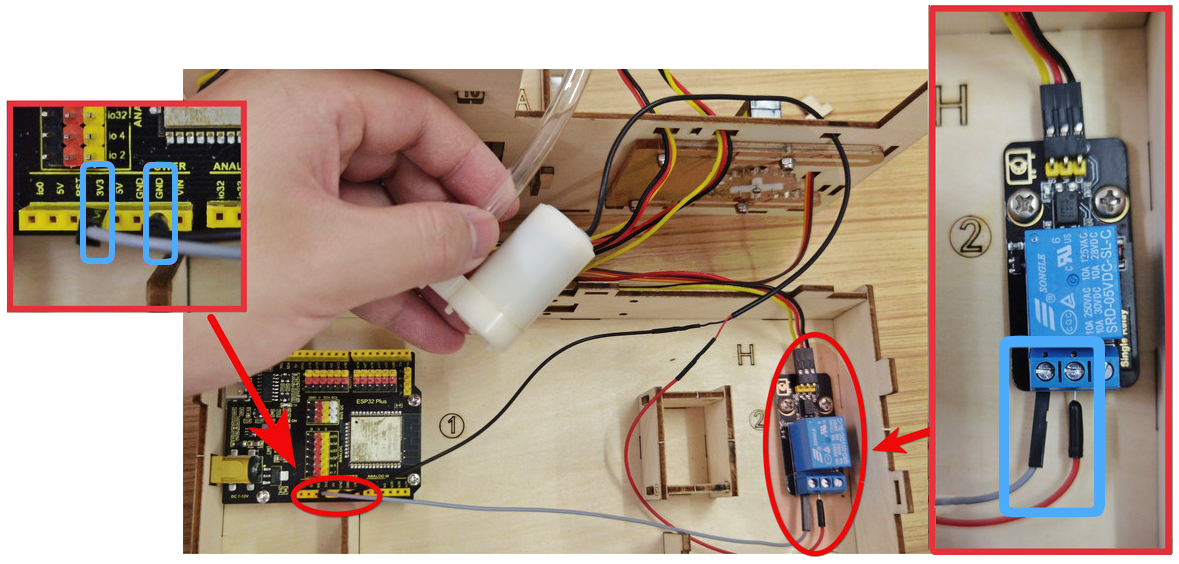
Placa ESP32 STEAMakers y módulo relé para controlar la bomba de agua

![]()


![]()

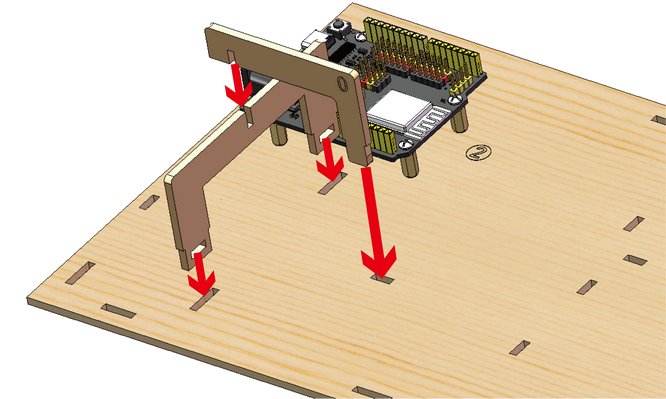
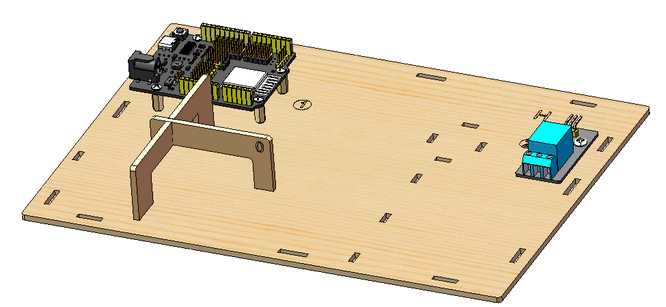
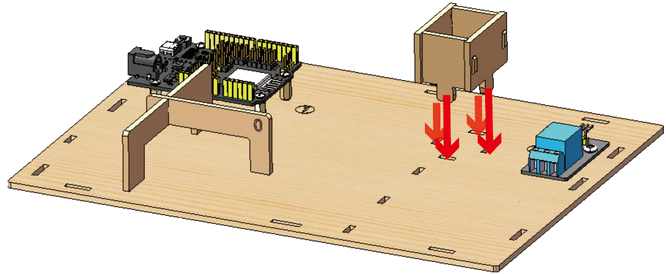
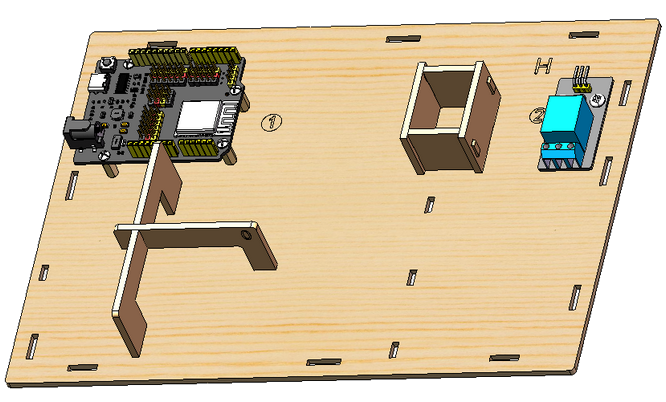
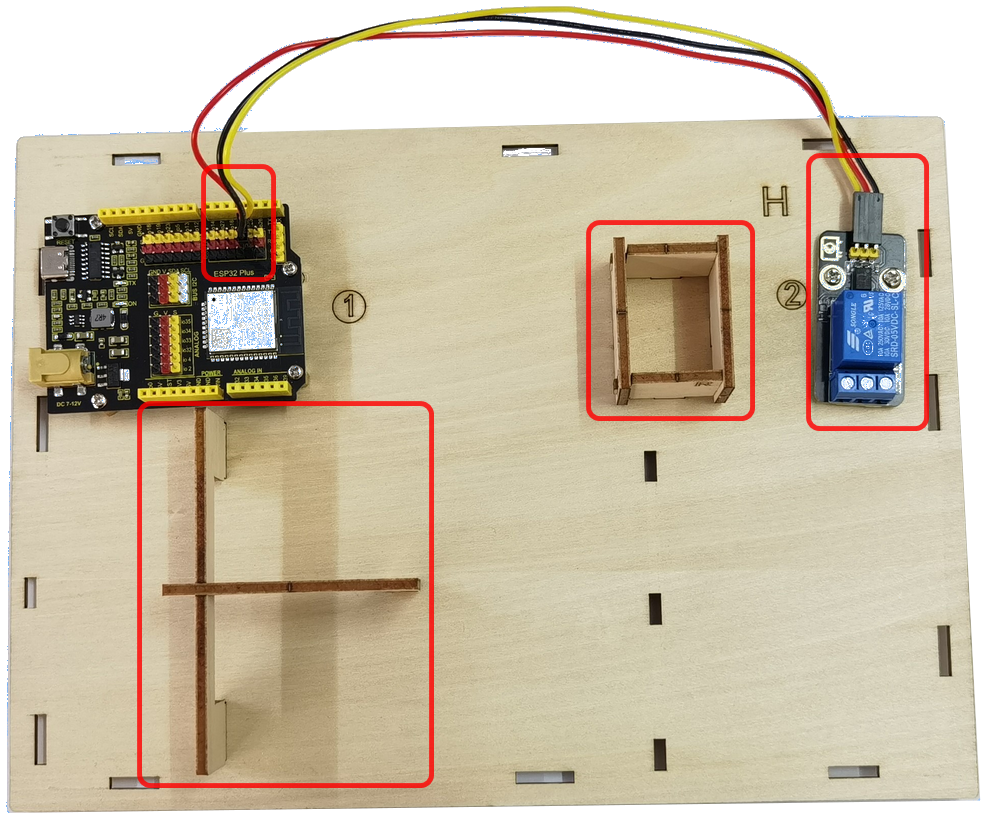
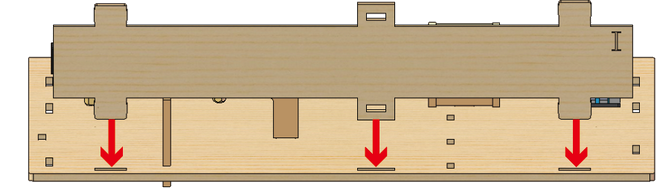
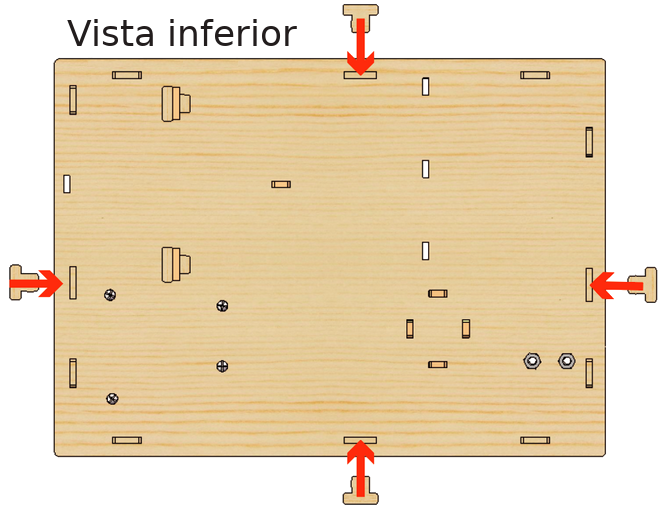
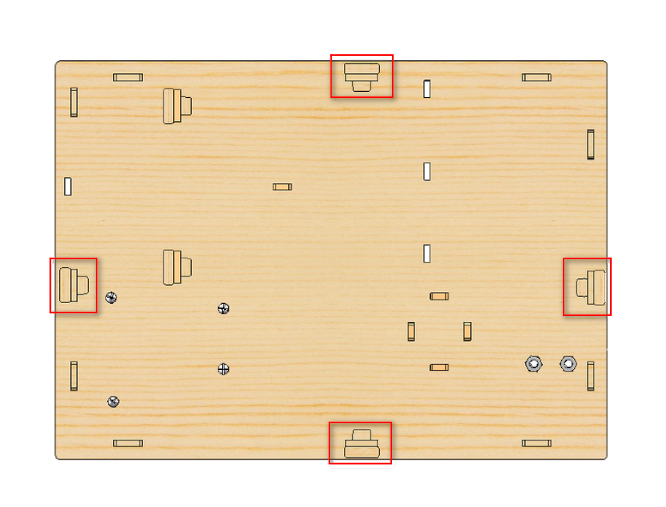
Paso 2

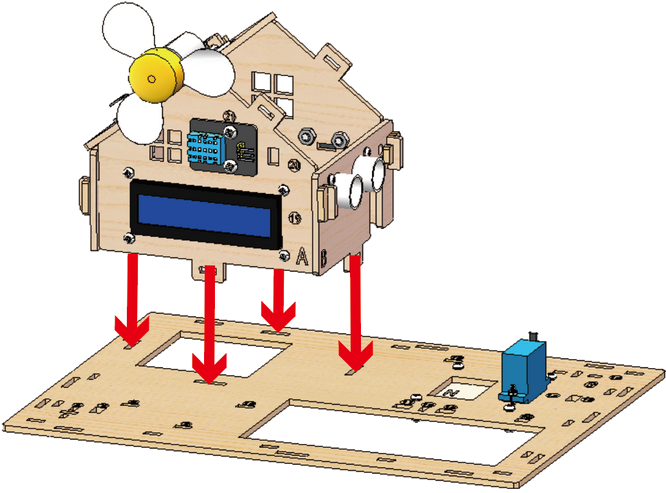
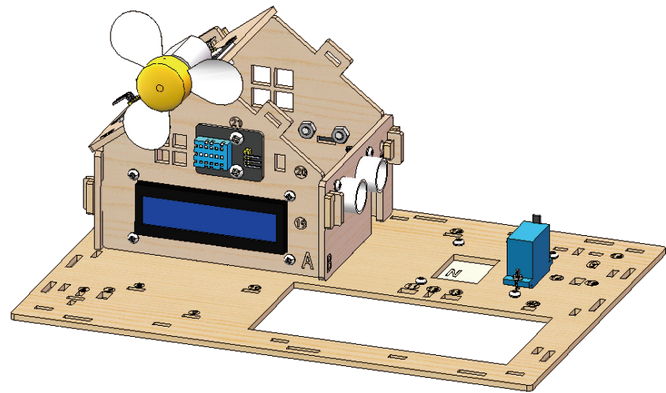
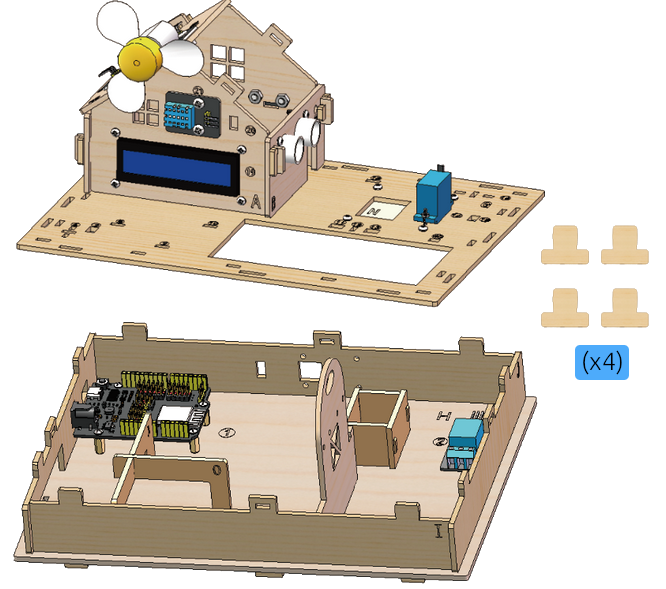
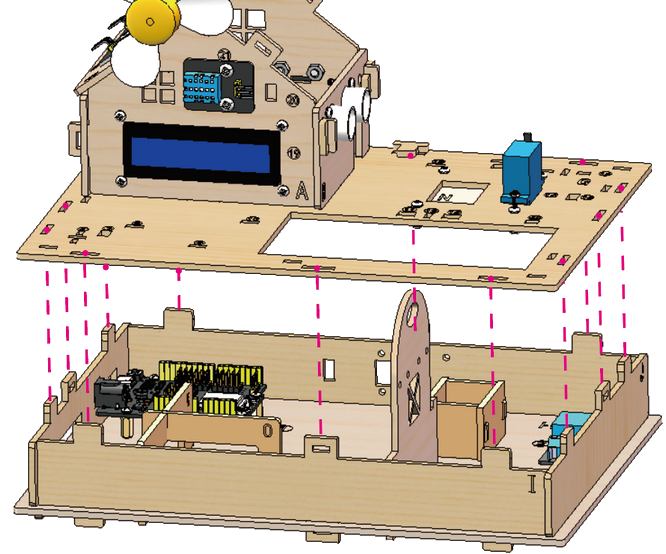
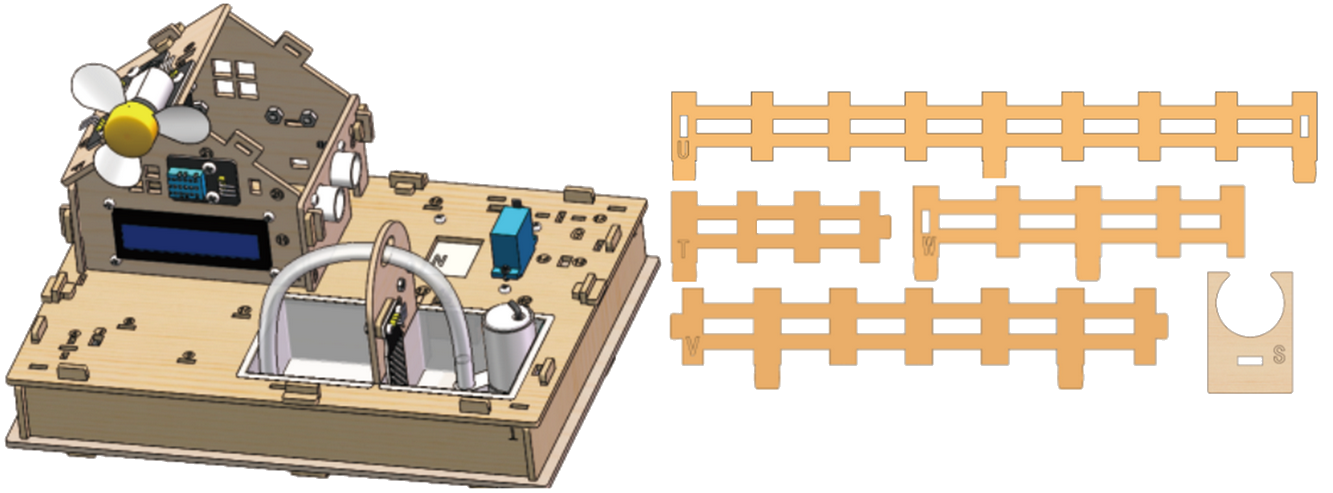
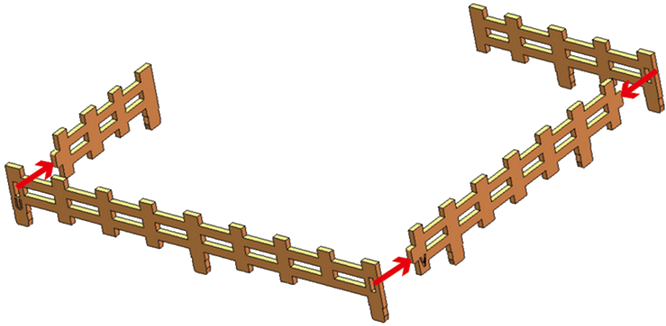
![]() Monte el tablero de madera X i O a la placa inferior H
Monte el tablero de madera X i O a la placa inferior H
![]()

![]()
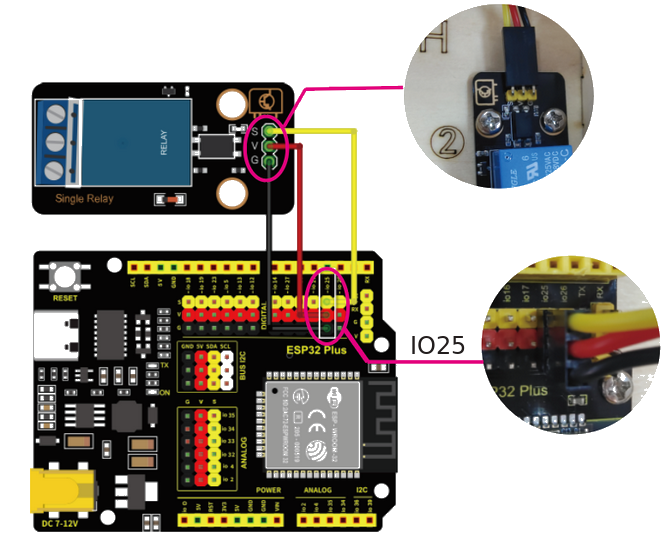
| Componente | Cable | Pin |
|---|---|---|
| Módulo relé | 3 pines / 20 cm | io25 |
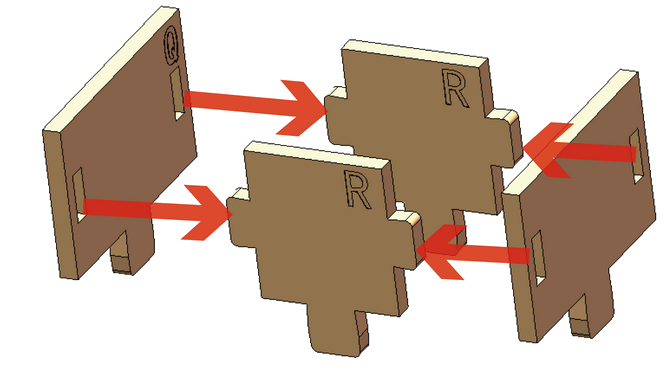
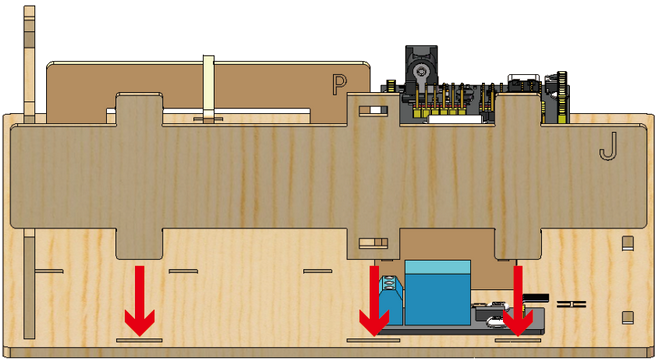
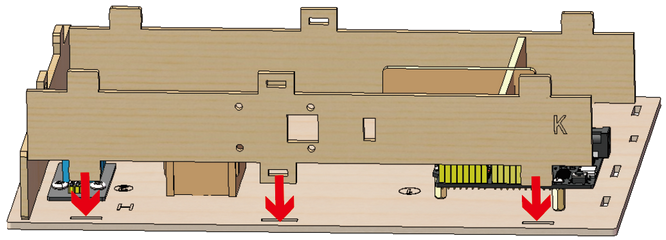
Paso 3
![]()
![]()
![]()
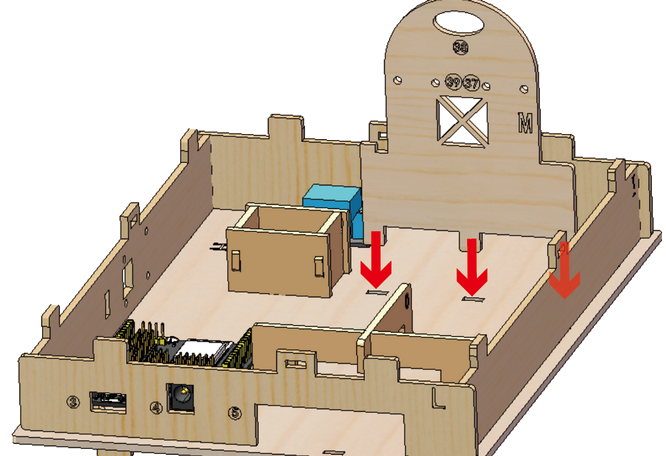
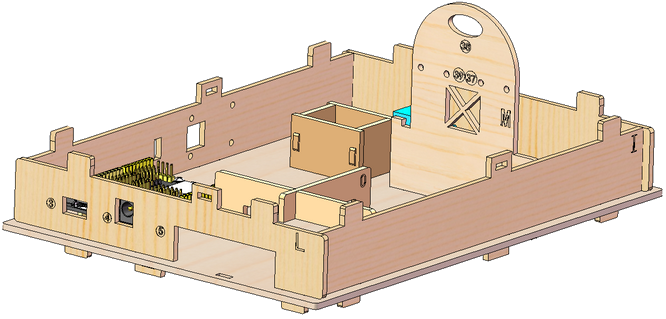
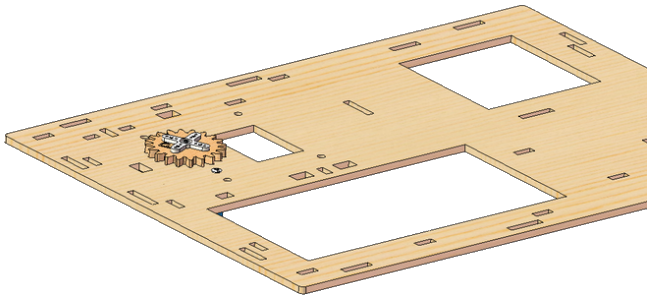
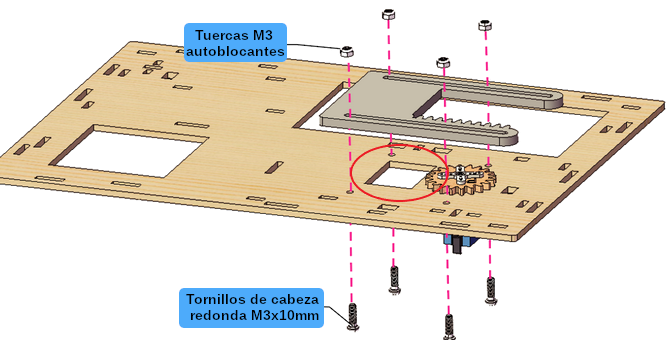
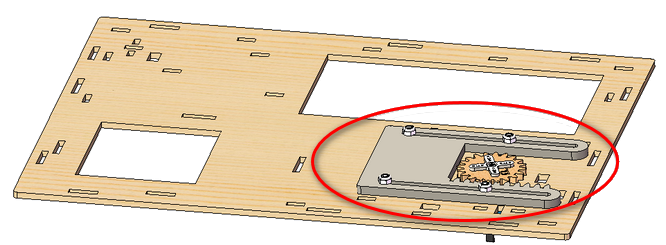
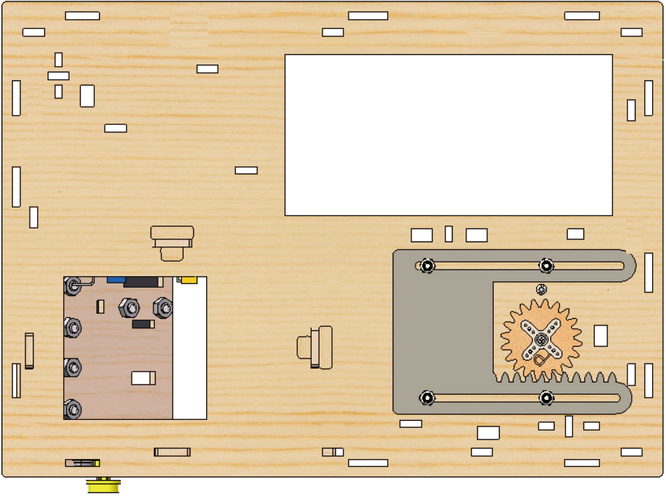
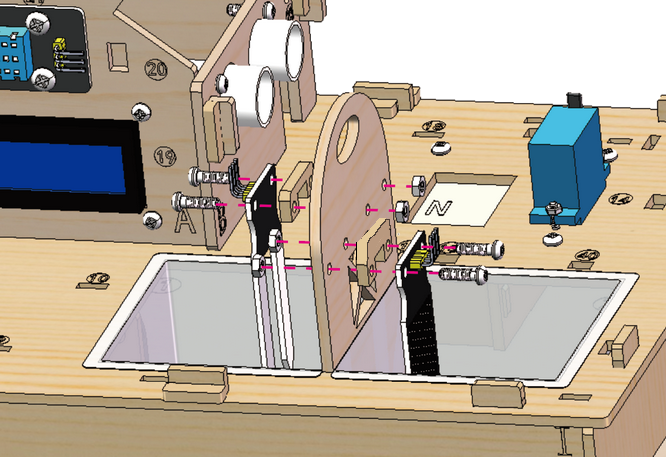
Paso 4
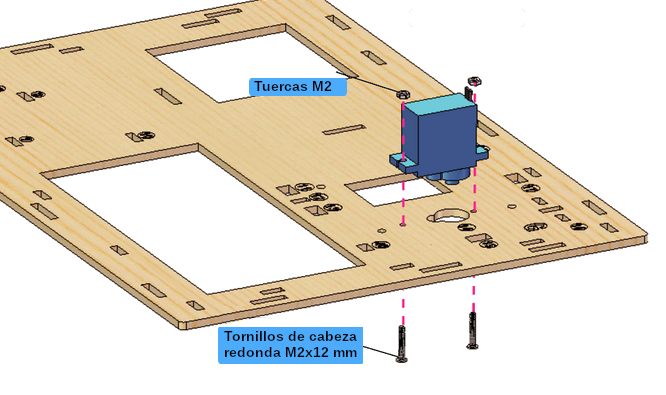
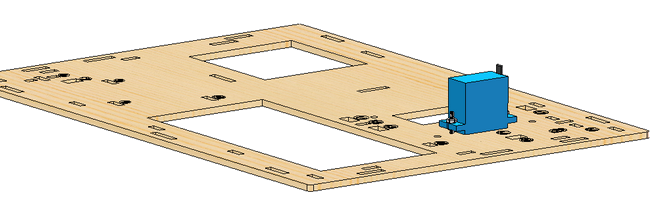
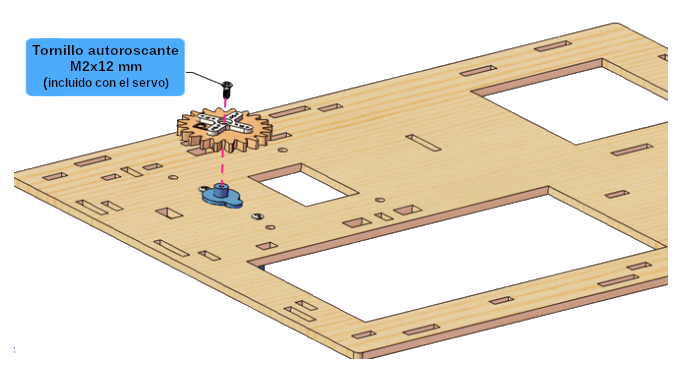
Servomotor i engranatge d'accionament de la portella
 Es necesario establecer el ángulo correcto del servomotor antes de fijar el engranaje.
El montaje se hará con la ventana cerrada, tal y como se muestra en las imágenes del apartado 4.
A continuación se muestran dos formas diferentes de establecer correctamente el ángulo del servo:
Es necesario establecer el ángulo correcto del servomotor antes de fijar el engranaje.
El montaje se hará con la ventana cerrada, tal y como se muestra en las imágenes del apartado 4.
A continuación se muestran dos formas diferentes de establecer correctamente el ángulo del servo:- Programación con MicroBlocks
- Programación con STEAMakersBlocks
Programación del servo
Programación con MicroBlocks

Antes de utilizar la placa ESP32 STEAMakers con MicroBlocks es necesario configurarla.
Con la placa conectada al puerto USB y al entorno MicroBlocks ( aquí se explica cómo hacerlo), utilice cualquiera de los siguientes métodos.
Atención
Conecte el servomotor al pin IO14 (D7).
#Método 1: librería Servomotor
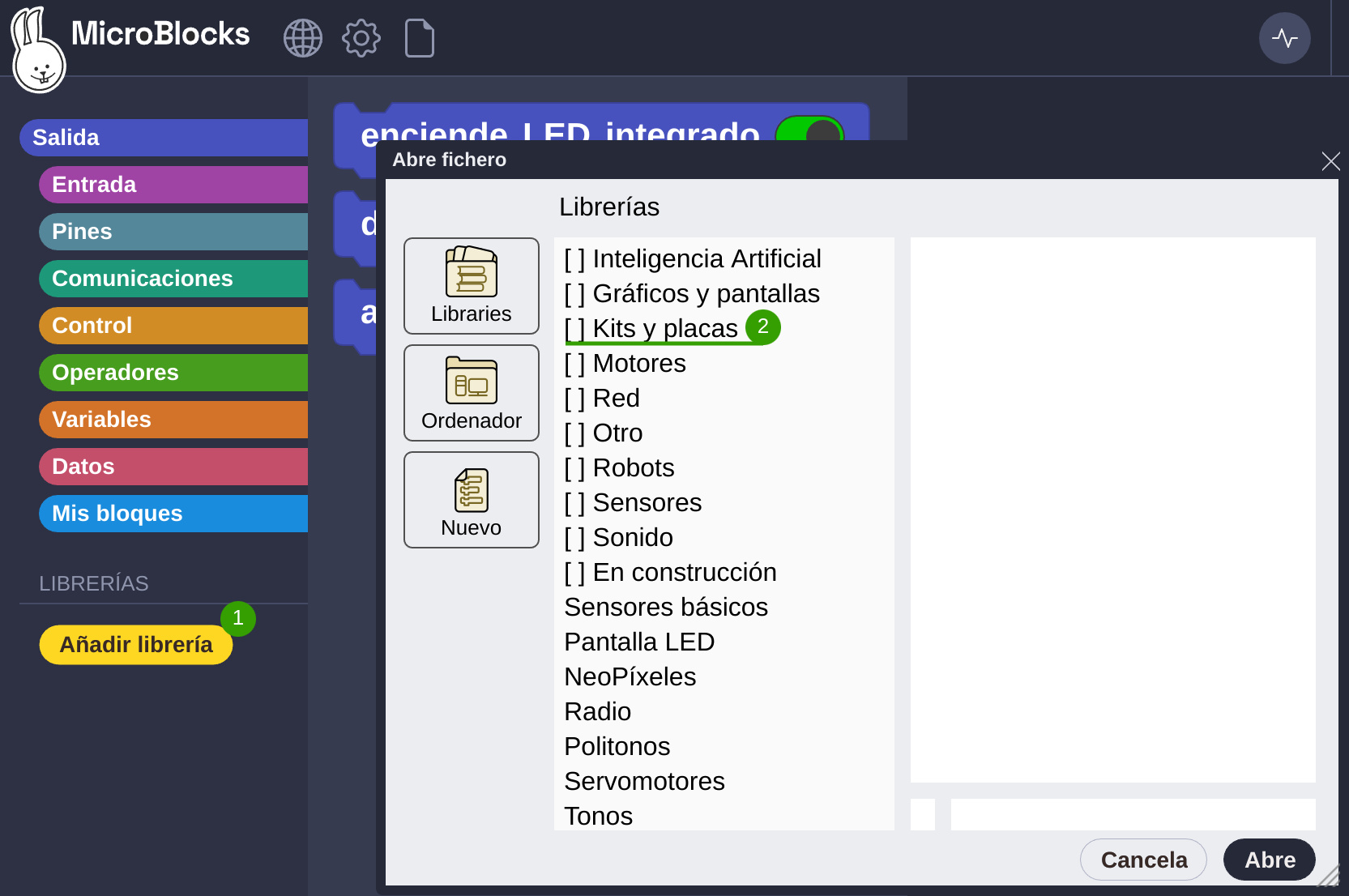
1.- Cargue la librería “Servomotores” haciendo clic en el botón Añadir Librería.
En la ventana emergente que aparecerá, haga doble clic en “Servomotores”- También puede seleccionar “Servomotores” y después hacer clic en el botón “Abre”:

2.- En la columna izquierda aparecerá una nueva categoría: “Servomotores”.
Haga clic sobre ella para ver los bloques que contiene.
3.- Seleccione el bloque “pon el servo …” que se muestra en la imagen:

4.- Conecte el servomotor al pin 14 (D7). Si utiliza un pin diferente, ponga este valor en el primer parámetro del bloque.
El segundo es el ángulo. Debe ser “-90” grados.
5.- Haga clic en el blog para posicionar al servomotor.
#Método 2: libreria Smart Farm
1.- Cargue la librería “Smart Farm”:
![]() Añadir librería ›
Añadir librería › ![]() Kits y placas ›
Kits y placas › ![]() Smart Farm
Smart Farm

2.- Busque el bloque

En la lista desplegable, deberá canviar el valor “abre” por “cierra”.
3.- Haga clic en el bloque anterior para posicionar al servomotor.
Programación con STEAMakersBlocks
En el enlace anterior también encontrará instrucciones para empezar a utilizar STEAMakersBlocks.
Atención
No olvide ejecutar el programa AB-Connector y conectar el servomotor al pin IO14 (D7).
Elabore el siguiente programa y cárguelo en la placa ESP32STEAMakers para posicionar correctamente el servomotor a 180º. Conecte el servomotor al pin IO14 (D7):

El código del programa resultante es el siguiente:
#include <ESP32Servo.h> Servo servo_14; void setup() { servo_14.attach(14); } void loop() { yield(); servo_14.write(180); }
![]()
![]()


![]()
![]()
* Conecte el servomotor al pin IO14 (D7)
| Componente | Cable | Pin |
|---|---|---|
| Servomotor | El propio del servomotor | io14 |
")

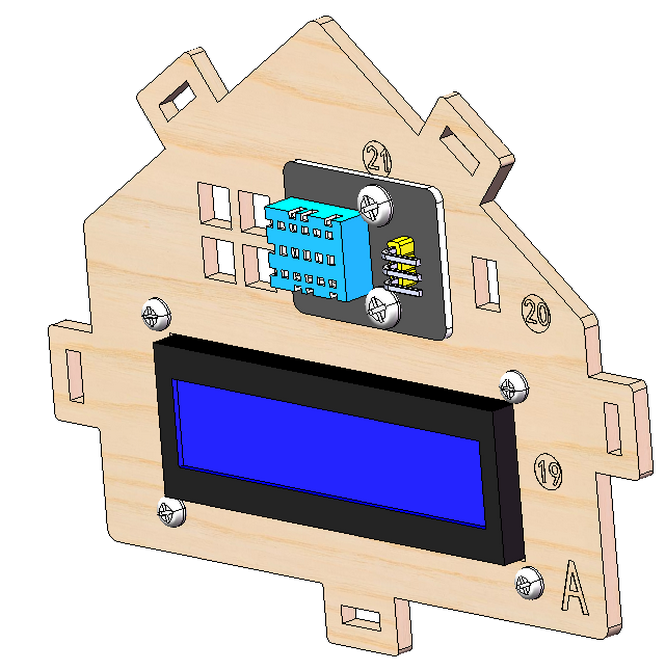
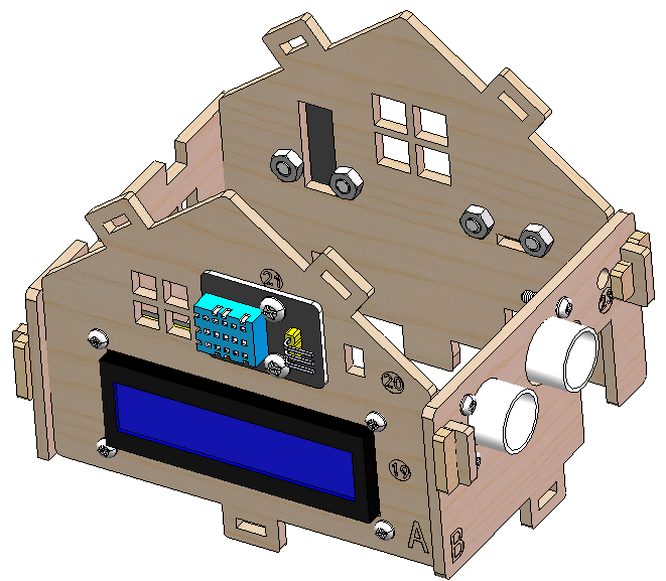
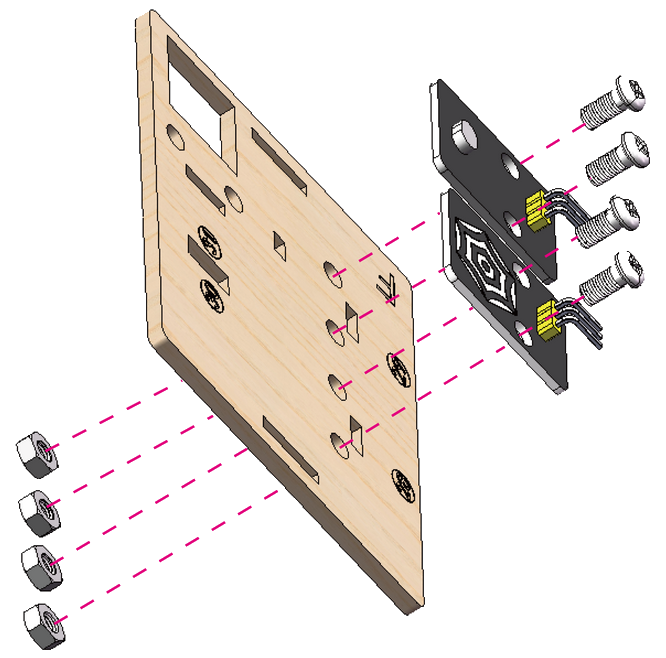
Paso 5
Pantalla LCD y sensor de humedad y temperatura (DHT11)

![]()
Pantalla LCD


![]()
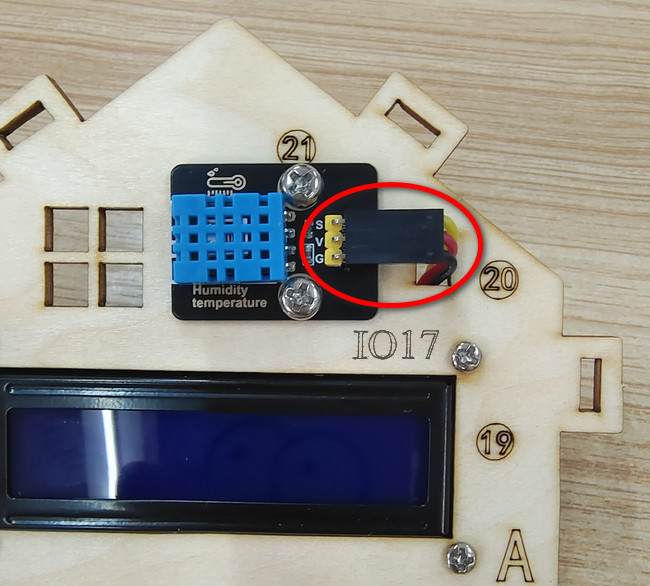
Sensor de humedad y temperatura

Atención al color de los cables
- Para el sensor de temperatura y humedad DHT11, conecte el amarillo a S, el rojo a V, el negro a G.
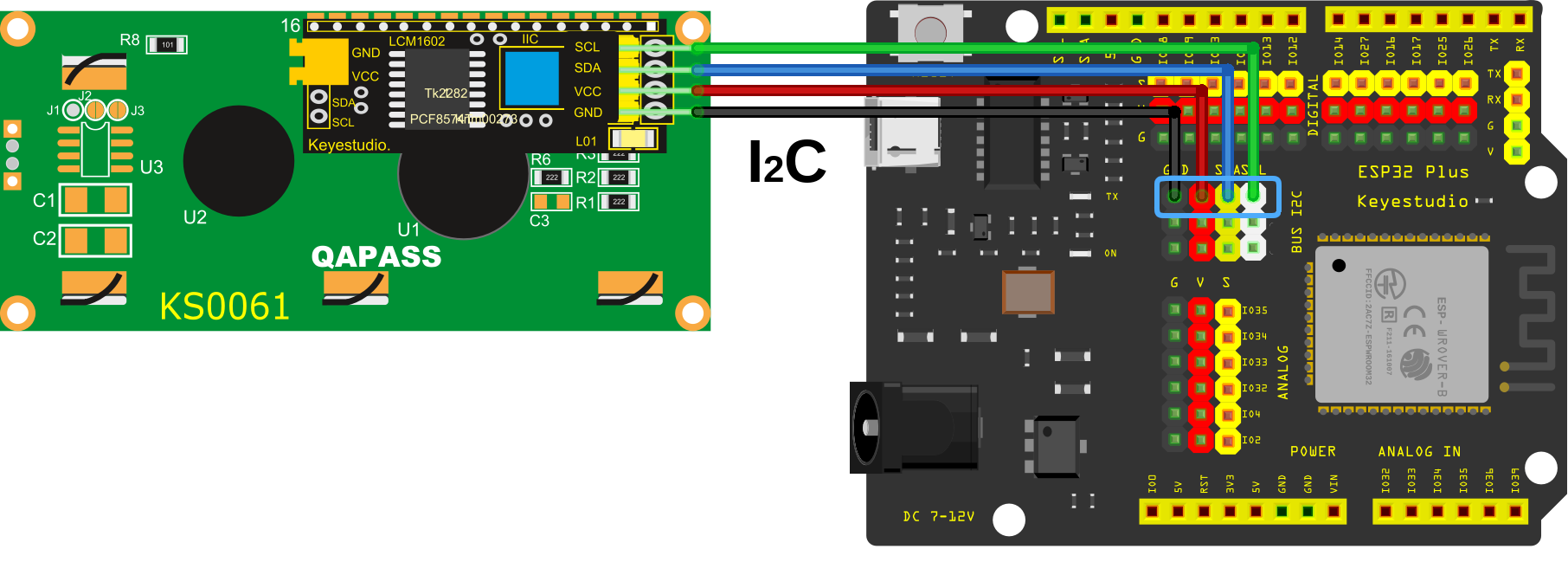
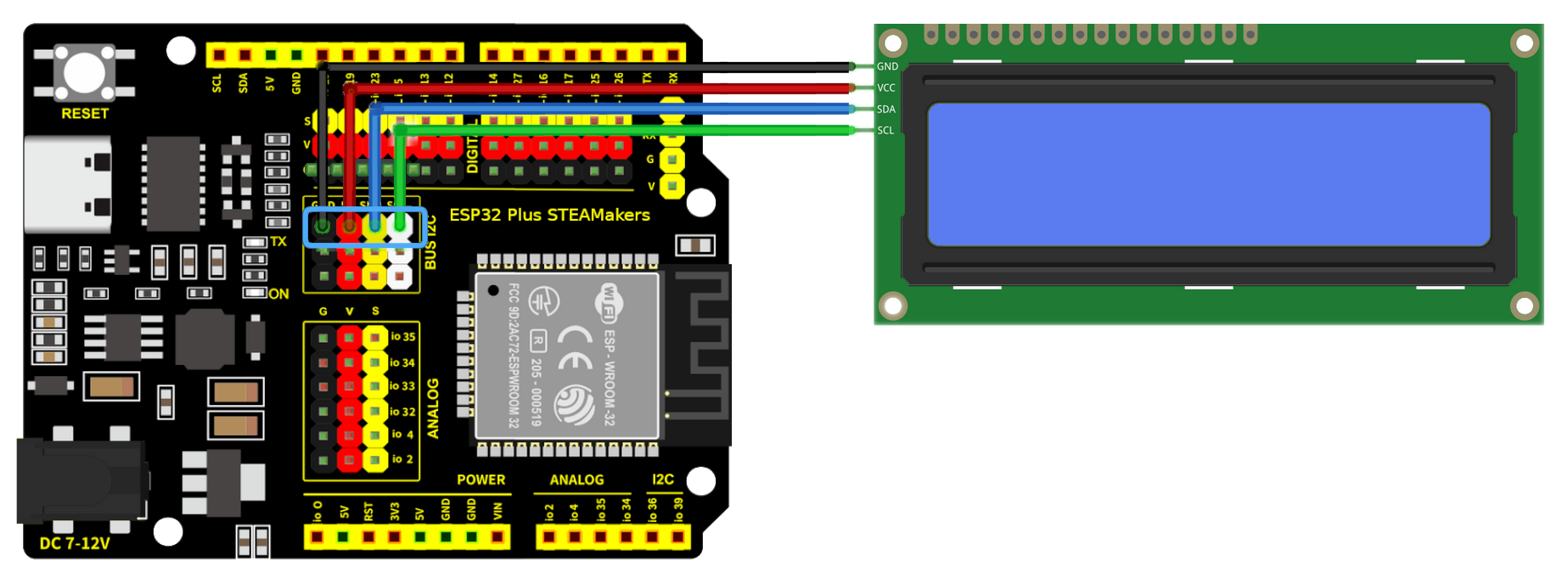
- Para la pantalla LCD, conecte el verde a SCL, el azul a SDA, el rojo a VCC, el negro a GND.
Sensor de humedad y temperatura DHT11
| Componente | Cable | Pin |
|---|---|---|
| Sensor de humedad y temperatura DHT11 | 3 pins / 20cm | io17 |

Pantalla LCD
| Componente | Cable | Pin |
|---|---|---|
| Pantalla LCD 1602 | 4 cables agrupados (Negro-Rojo-Azul-Verde) | I2C |

Paso 6
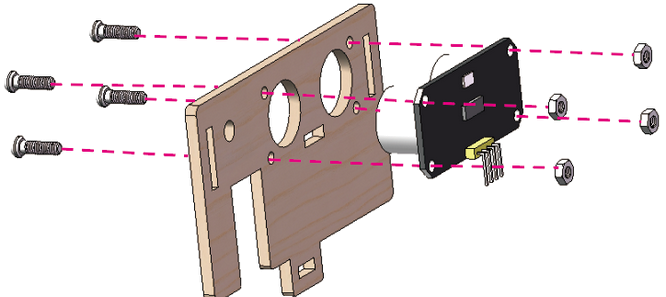
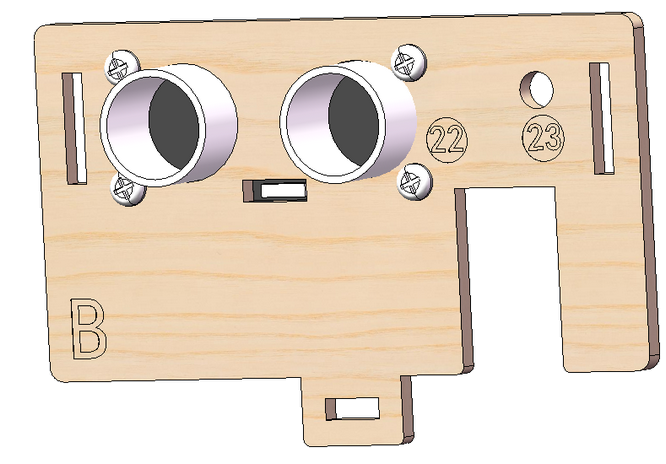
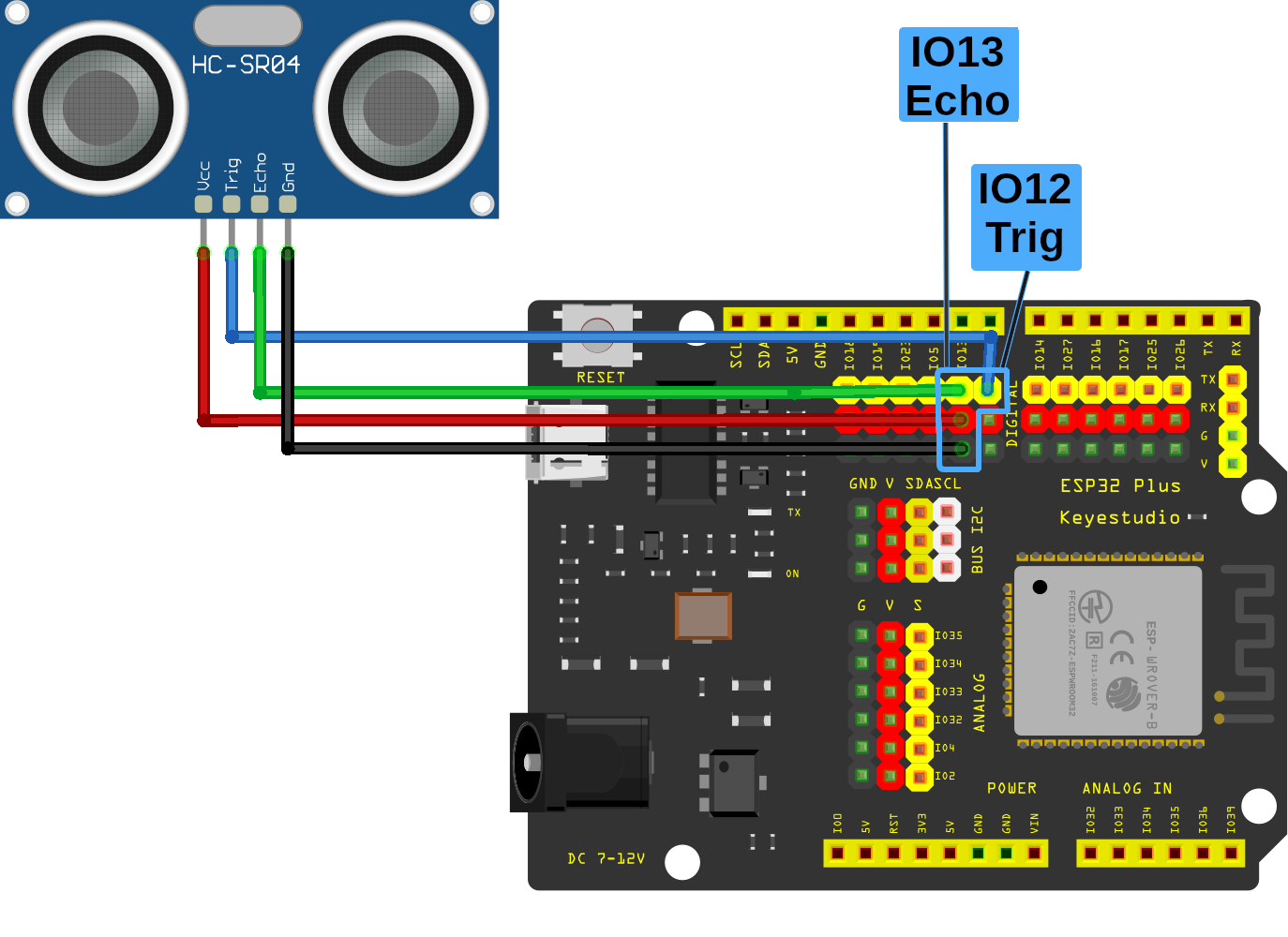
Módulo de ultrasonidos (sensor de distancia)

| Componente | Cable | Pin |
|---|---|---|
| Módulo de ultrasonidos | 4 pines divididos (Negro-Rojo-Verde) | io13 (ECHO) |
| Módulo de ultrasonidos | Cable Azul | io12 (TRIG) |
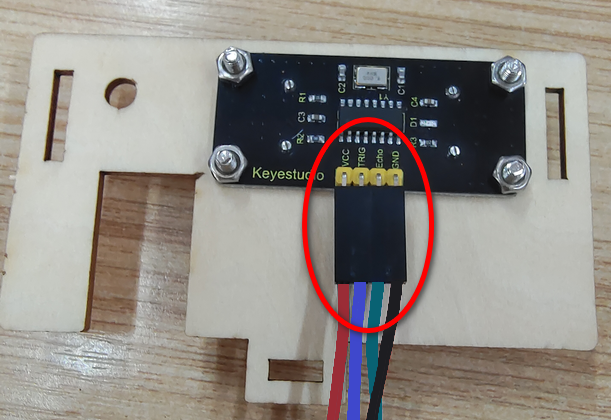
Módulo de ultrasonidos - Atención al cableado
El cable para conectar el sensor de ultrasonidos tiene terminales diferentes en sus extremos:- Un único conector con los colores rojo, azul, verde y negro (en este orden o el inverso). Este extremo debe conectarse al módulo de ultrasonidos.
Haga coincidir el terminal del cable rojo con VCC, el del azul con TRIG, el del verde con ECHO y el del negro con GND. Encontrará los indicadores VCC, TRIG, ECHO y GND serigrafiados en el módulo. - En el otro extremo los hilos están separados:
- Conecte el cable azul a IO12, en el terminal de color amarillo S.
- Conecte los tres hilos restantes a IO13:
el rojo al terminal rojo (V), el negro al terminal negro (G) y el cable verde en el terminal amarillo (S).
Paso 7
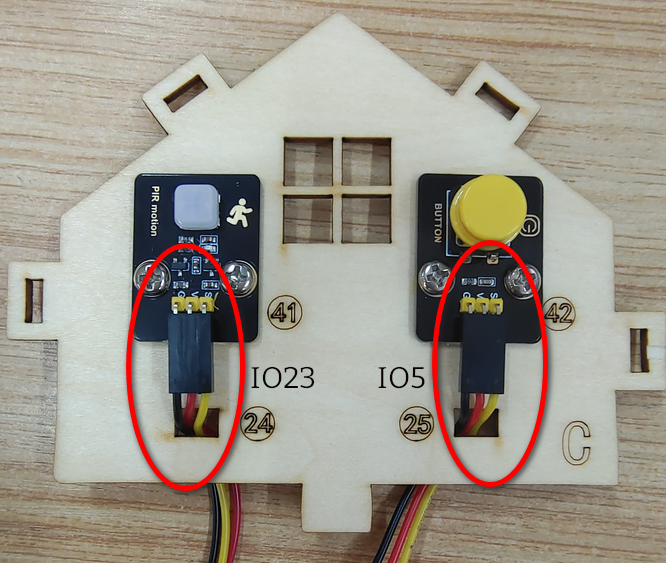
Sensor de movimiento (PIR) y pulsador

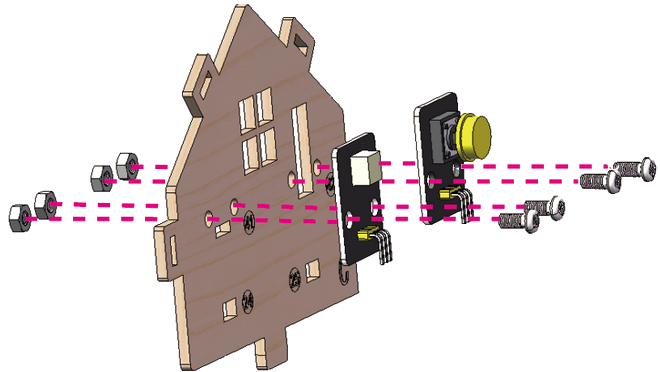

| Componente | Cable | Pin |
|---|---|---|
| Sensor de movimiento PIR | 3 pines / 15 cm | io23 |
| Pulsador | 3 pines / 15cm | io5 |

Paso 8
Paso 9
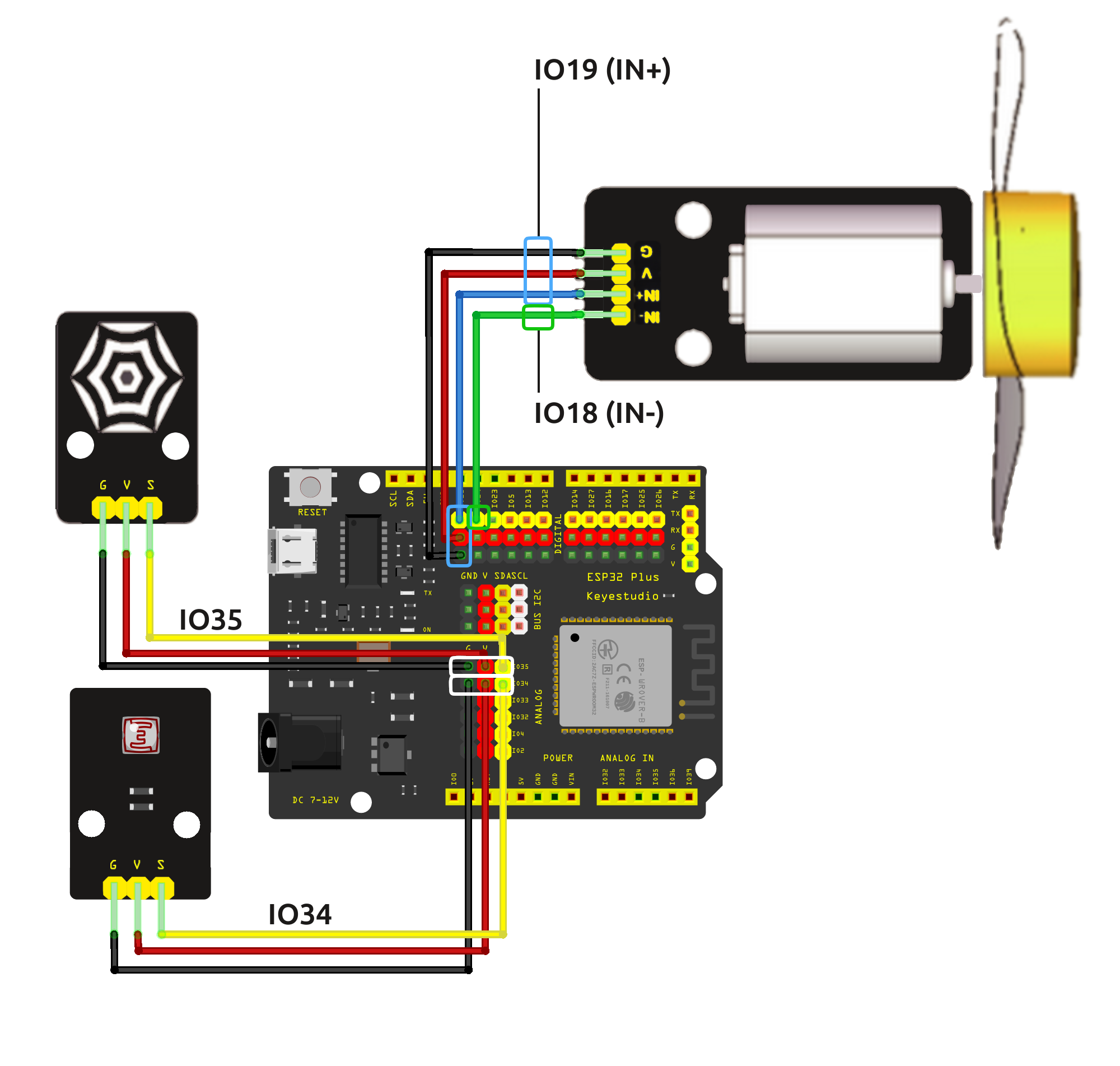
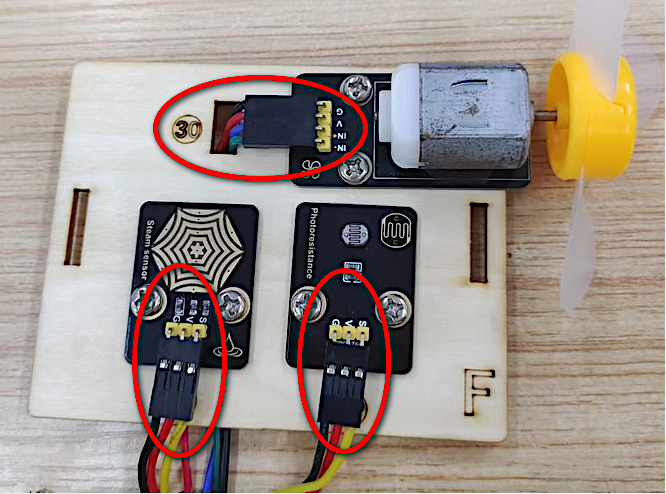
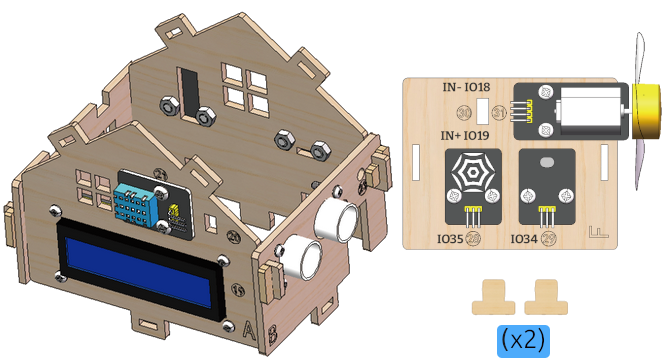
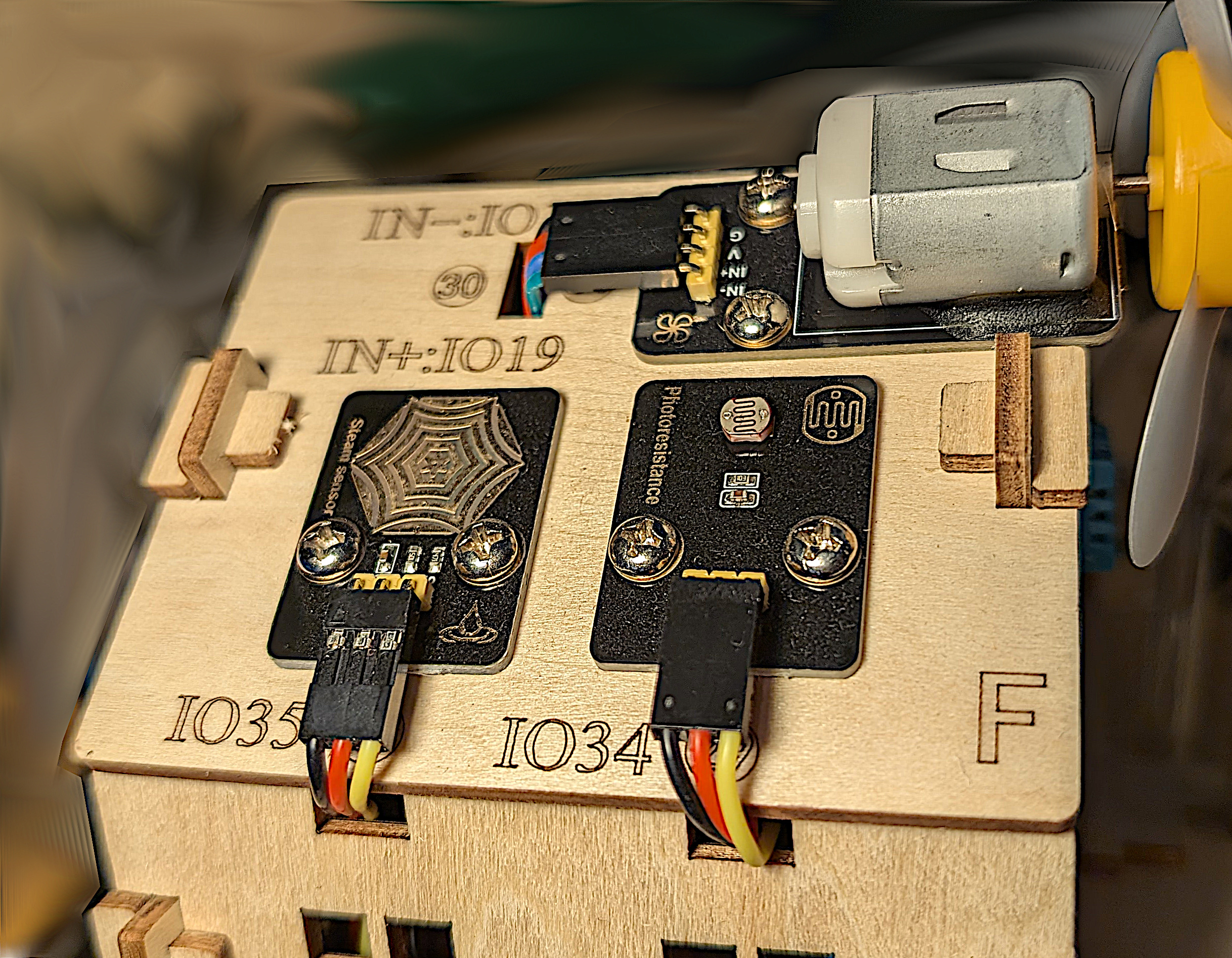
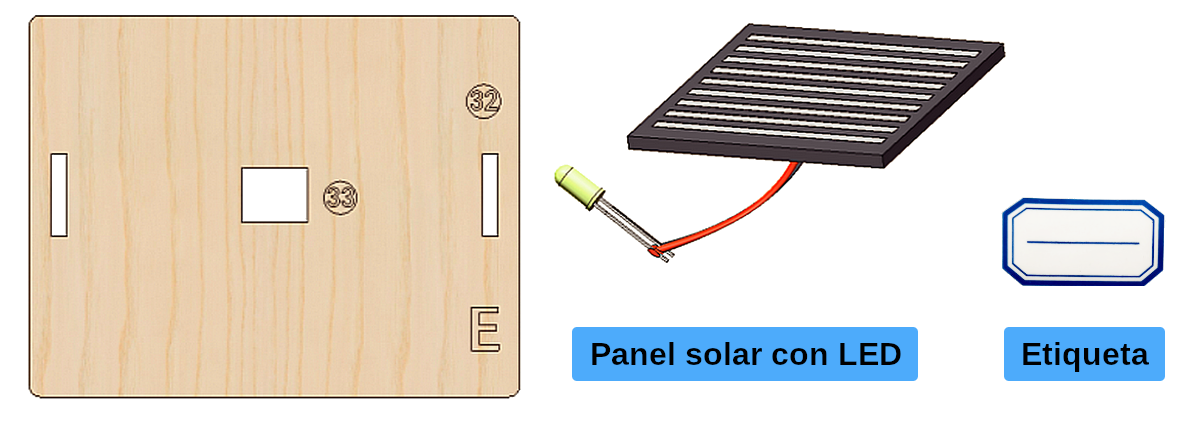
Sensor de cantidad de luz (fotoresistor), sensor de vapor y ventilador (motor)

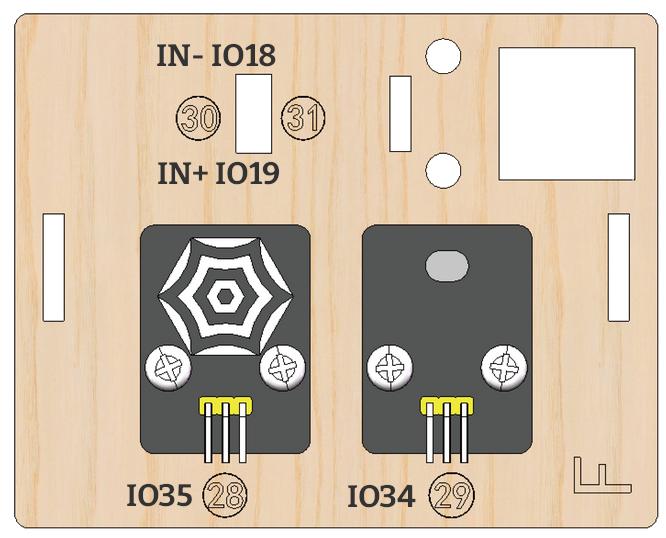

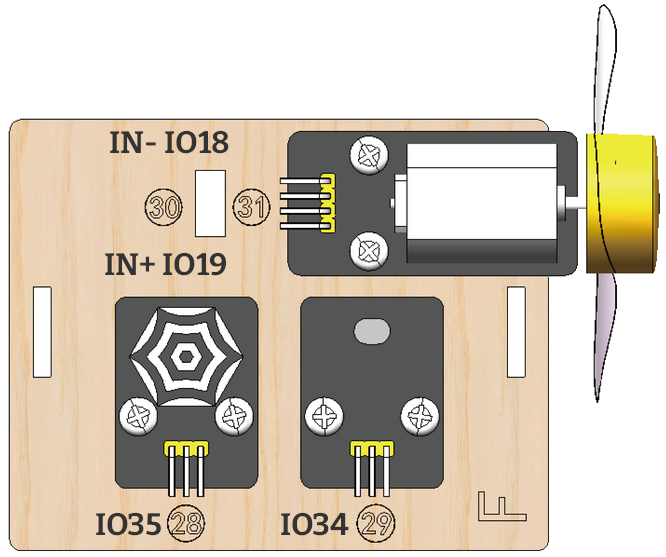
| Componente | Cable | Pin |
|---|---|---|
| Motor | 4 pines extremo dividido (negro, rojo, azul, verde) | IN- io18 /IN+ io19 |
| Fotoresistor | 3 pines / 15cm | io34 |
| Sensor de vapor | 3 pines / 15cm | io35 |
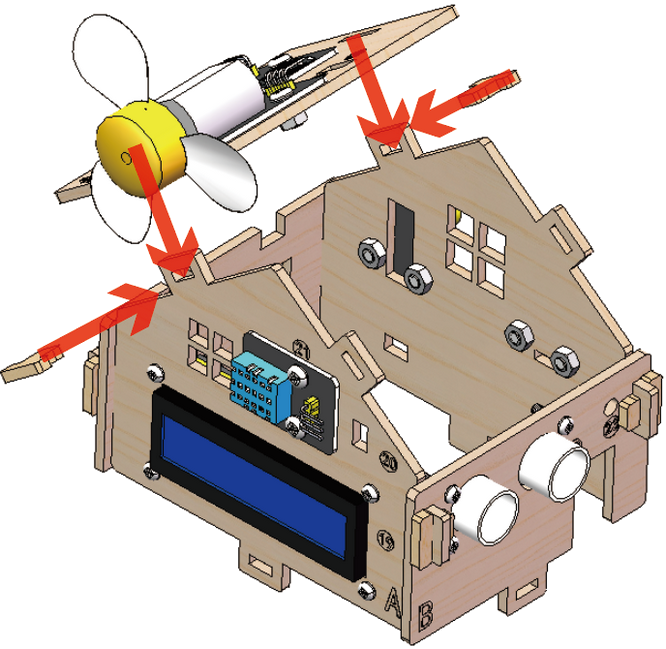
Paso 10
Paso 11

Paso 12
Paso 13
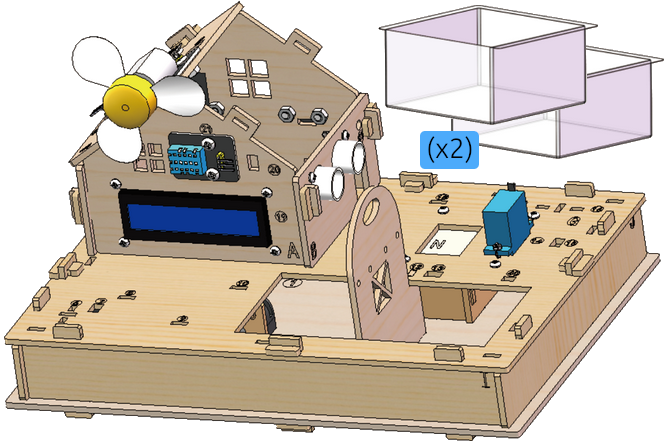
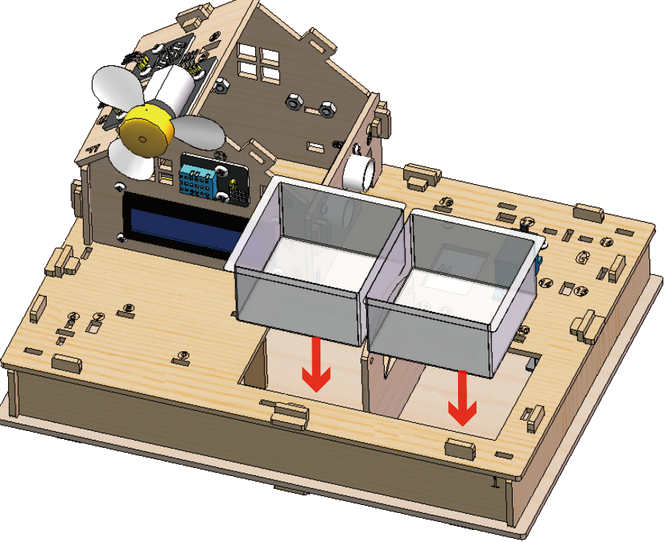
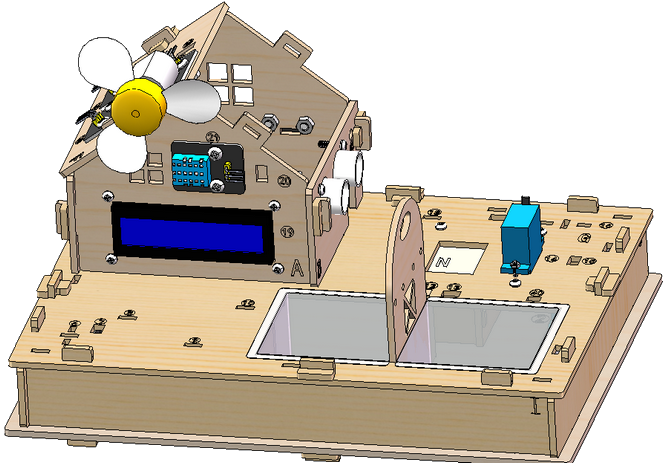
Cubetas para el agua de riego y tierra del huerto
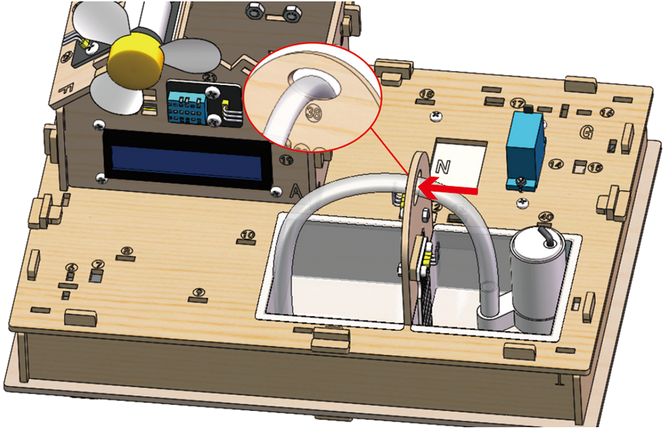
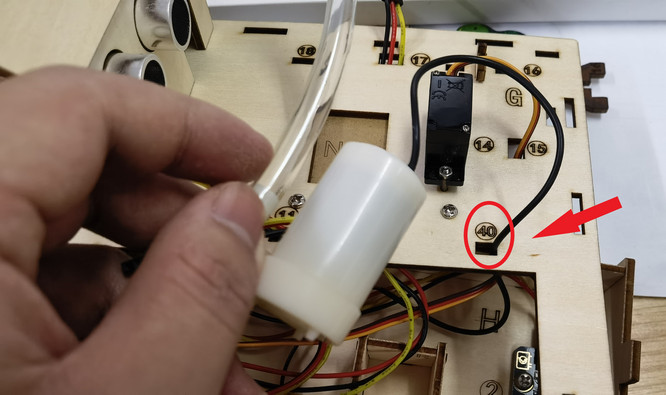
Paso 14
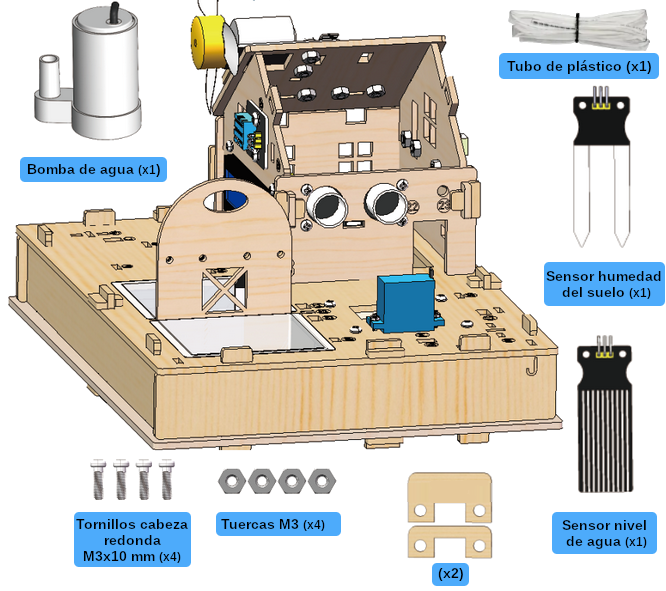
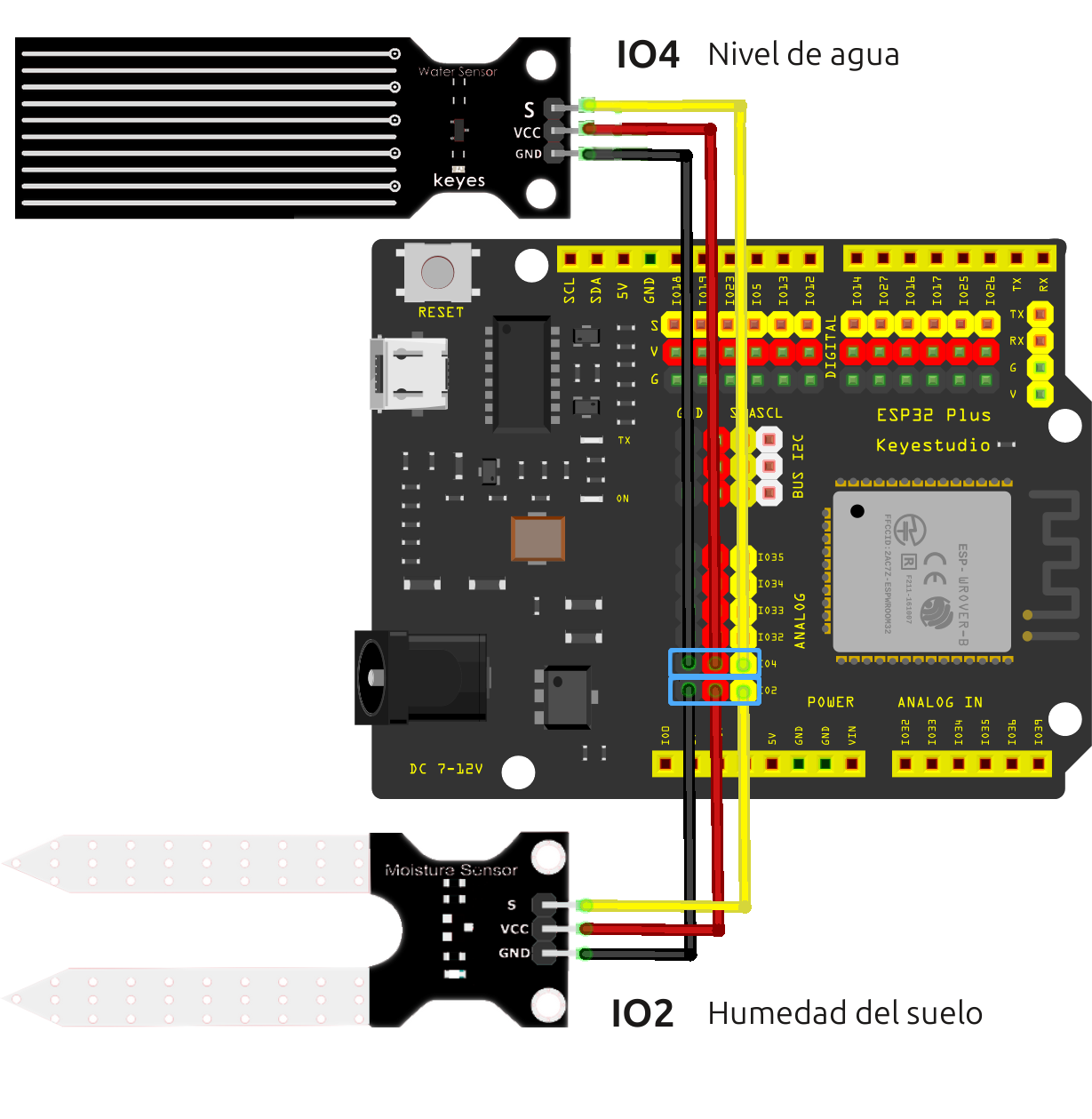
Sensores: humedad del suelo y nivel de agua. Bomba de agua
![]()
Sensores de humedad del suelo y de nivel de agua

![]()
Bomba de agua
| Componente | Cable | Pin |
|---|---|---|
| Sensor de humedad del suelo | 3 pines / 20cm | io2 |
| Sensor de nivel de agua | 3 pines / 25cm | yo4 |
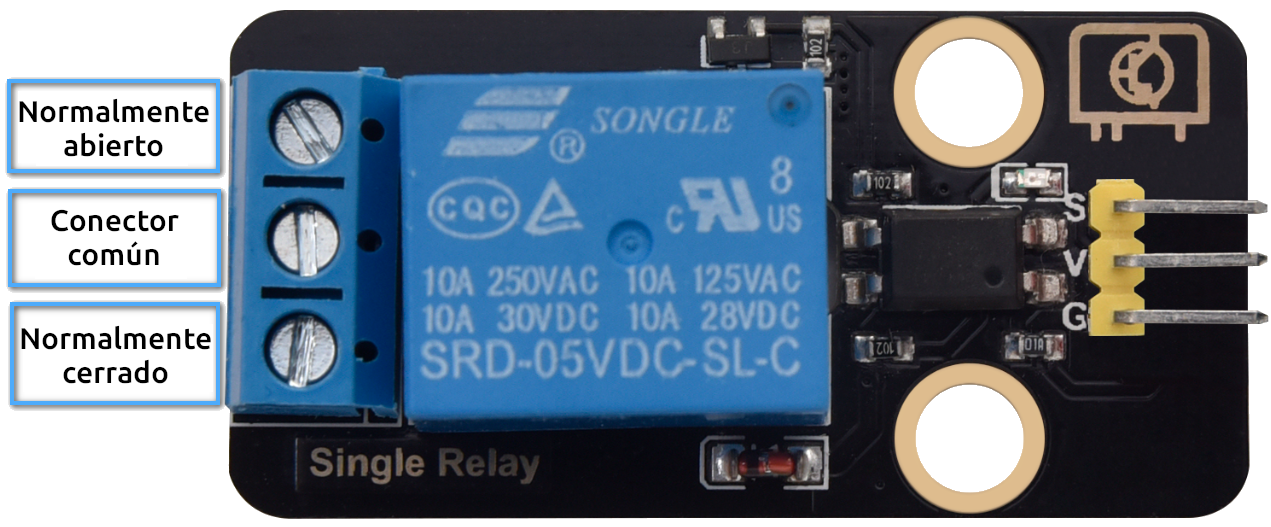
| Relé (bomba de agua) | 3 pines / 20 cm | yo25 |
| Bomba de agua | Negro / Rojo | GND / Conector común del relé |
| Cable | Gris | Pin 3V3 a conector normalmente abierto del relé |
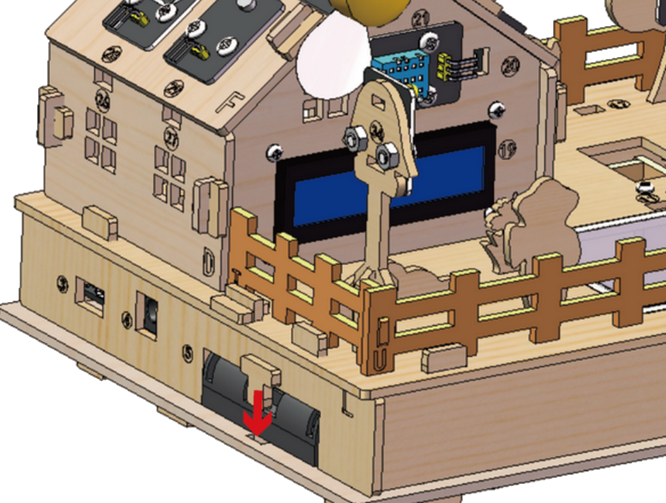
Paso 15

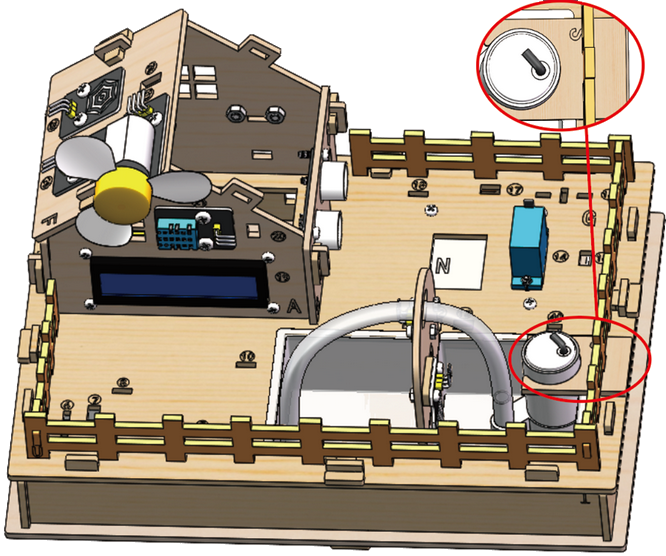
Paso 16
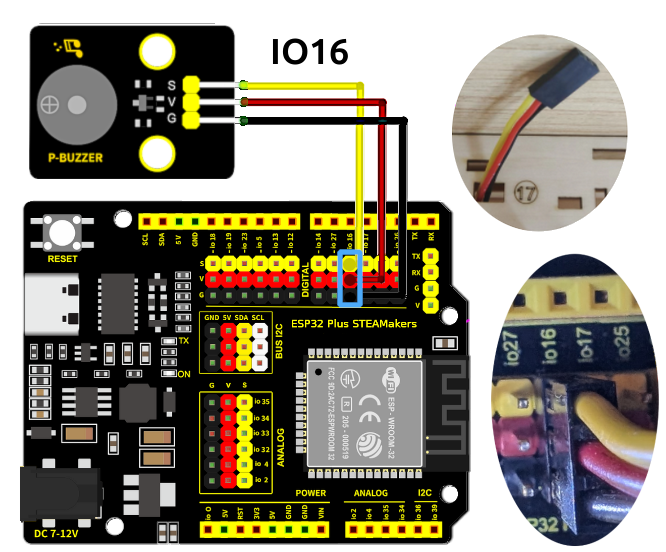
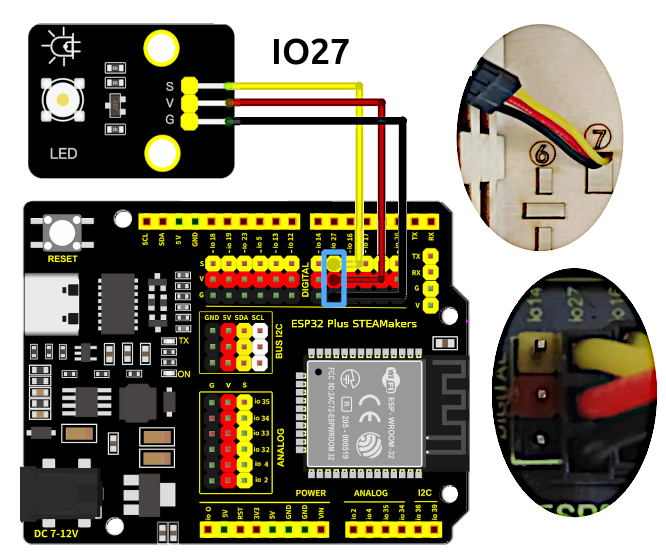
Led y zumbador pasivo
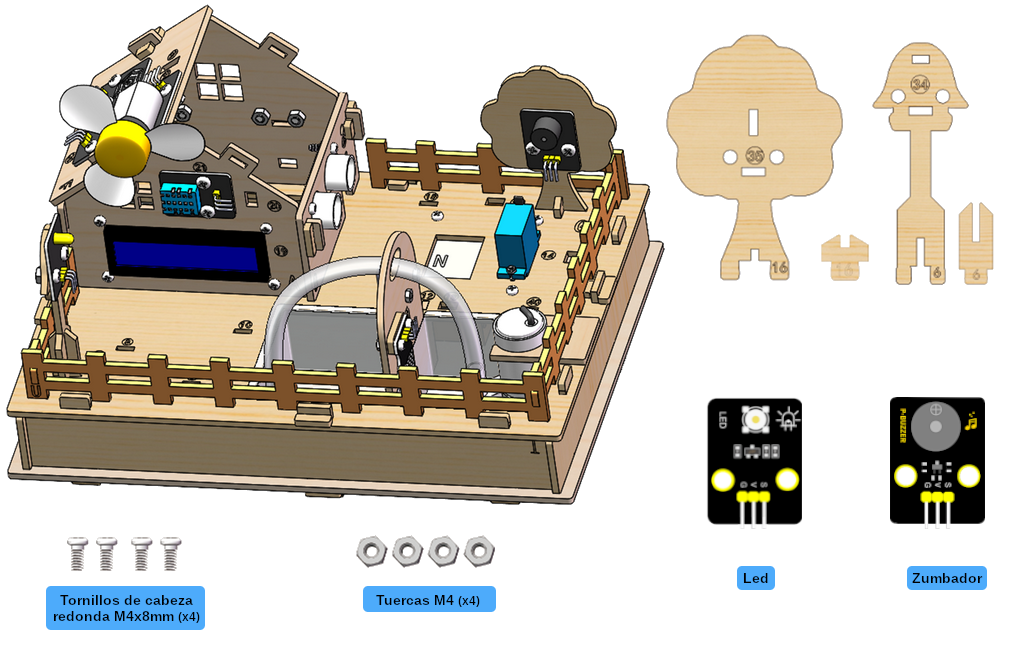


| Componente | Cable | Pin |
|---|---|---|
| Zumbador | 3 pines / 20 cm | io16 |
| Led blanco | 3 pines / 20 cm | io27 |
Paso 17
Paso 18

Paso 19
Esquema de conexiones
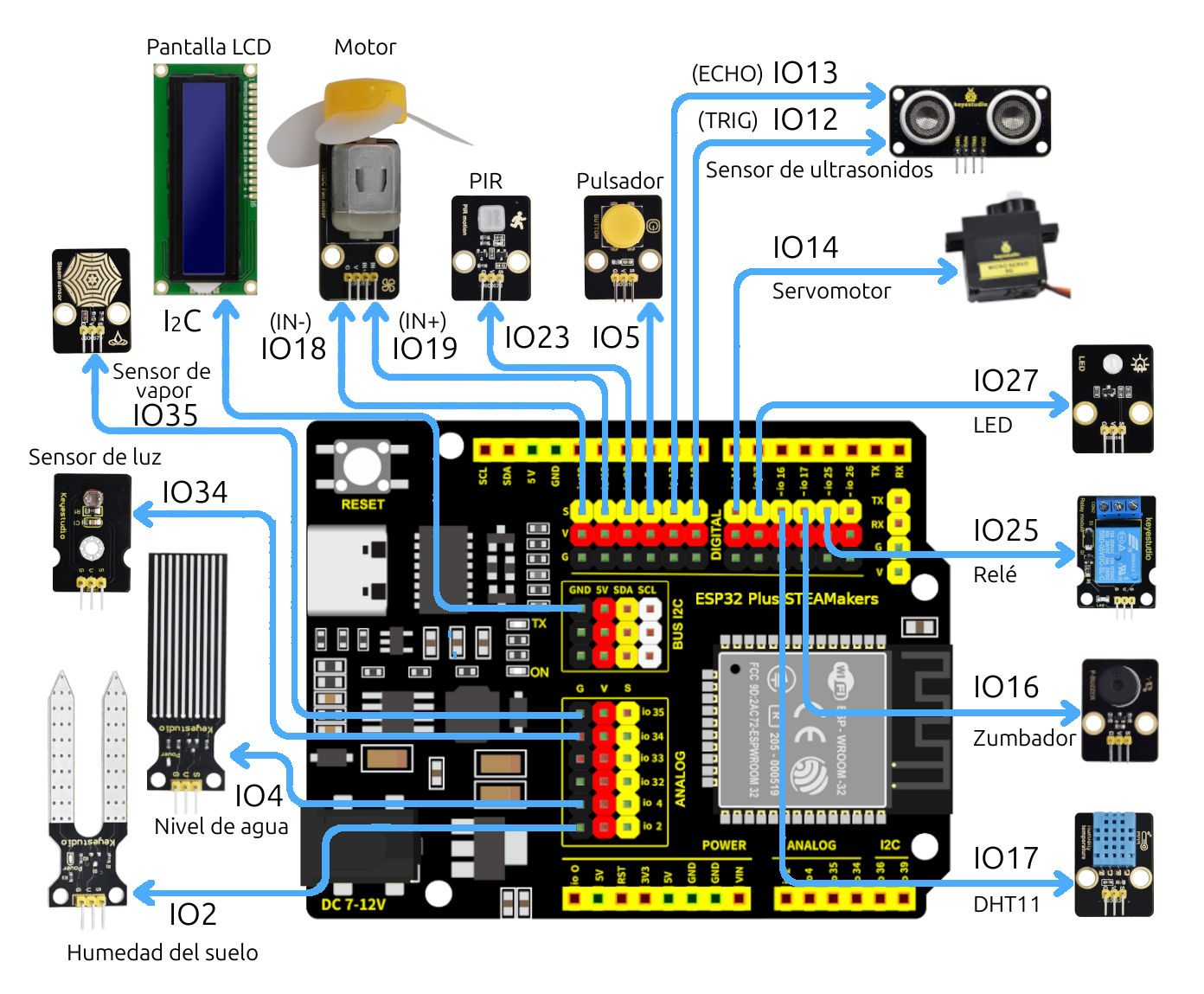
| Componente | Pin |
|---|---|
| Zumbador pasivo | io16 |
| Sensor de luz | io34 |
| Led blanco | io27 |
| Motor (ventilador) | io18(IN-) / io19(IN+) |
| Módulo de ultrasonidos | io12(TRIG) / io13(ECHO) |
| Pantalla LCD 1602 | I2C |
| Pulsador | io5 |
| Relé (bomba de agua) | io25 |
| Sensor de humedad del suelo | io2 |
| Sensor de humedad y temperatura DHT11 | io17 |
| Sensor de movimiento PIR | io23 |
| Sensor de nivel de agua | io4 |
| Sensor de vapor y lluvia | io35 |
| Servomotor | io14 |