1.- Comprobamos que el kit Imagina 3dBot con la placa ESP32STEAMakers contenga todo el material que se específica a la página 10.

2.- Colocamos y verifiamos que el chasis ya lleve puesta la rueda “loca” trasera.

3.- Montamos la placa ESP32STEAMakers y el shield Imagina Arduino encima de la chasis con 3 tornillos de estrella de 2,9×6,5mm. (Ya ralizado para las primeras prácticas)

4.- Preparamos el motor izquierdo (motor A9, que es el motor que lleva incorporado el sensor de línea fotoeléctrico que hace de “encoder”.
Hemos de poner el soporte para el sensor de línea tal y como se ve en la fotografía con un tornillo de 2,9×6,5mm.


5.- Sujetamos al chasis los motores del robot apretándolos con dos tornillos de 2,9x25mm.
¡Importante! No hay que apretar en exceso los tornillos para no aplastar la caja reductora y los engranajes de los motores.
Hemos de tener en cuenta que el motor A lleva el encoder, es el que se coloca a la izquierda.


6.- Insertamos la batería Power Bank, en la parte inferior del chasis con el connector USB hacia la parte trasera.

7.- Conectamos el motor izquierdo o motor A y el motor derecho o motor B a la placa.

8.- Colocamos los sensores de línea fotoeléctricos, sujetándolos con un tornillo de M3x12 y una tuerca de M3.


9.- Cuando ya los tenemos montados, conectamos el sensor fotoeléctrico izquierdo a la entrada D5 o SL, y el sensor fotoeléctrico derecho a la entrada D6 o SR, con sus respectivos cables.
También conectamos a la entrada D15 el sensor de línea fotoeléctrico de la rueda izquierda (encoder).

10.- Colocamos las ruedas al robot.

11.- Conectamos el sensor de ultrasonidos a la placa Imagina Arduino en su correspondiente zócalo, en la parte delantera de la placa.
Ya utilizado para el ejercicio de distancias.

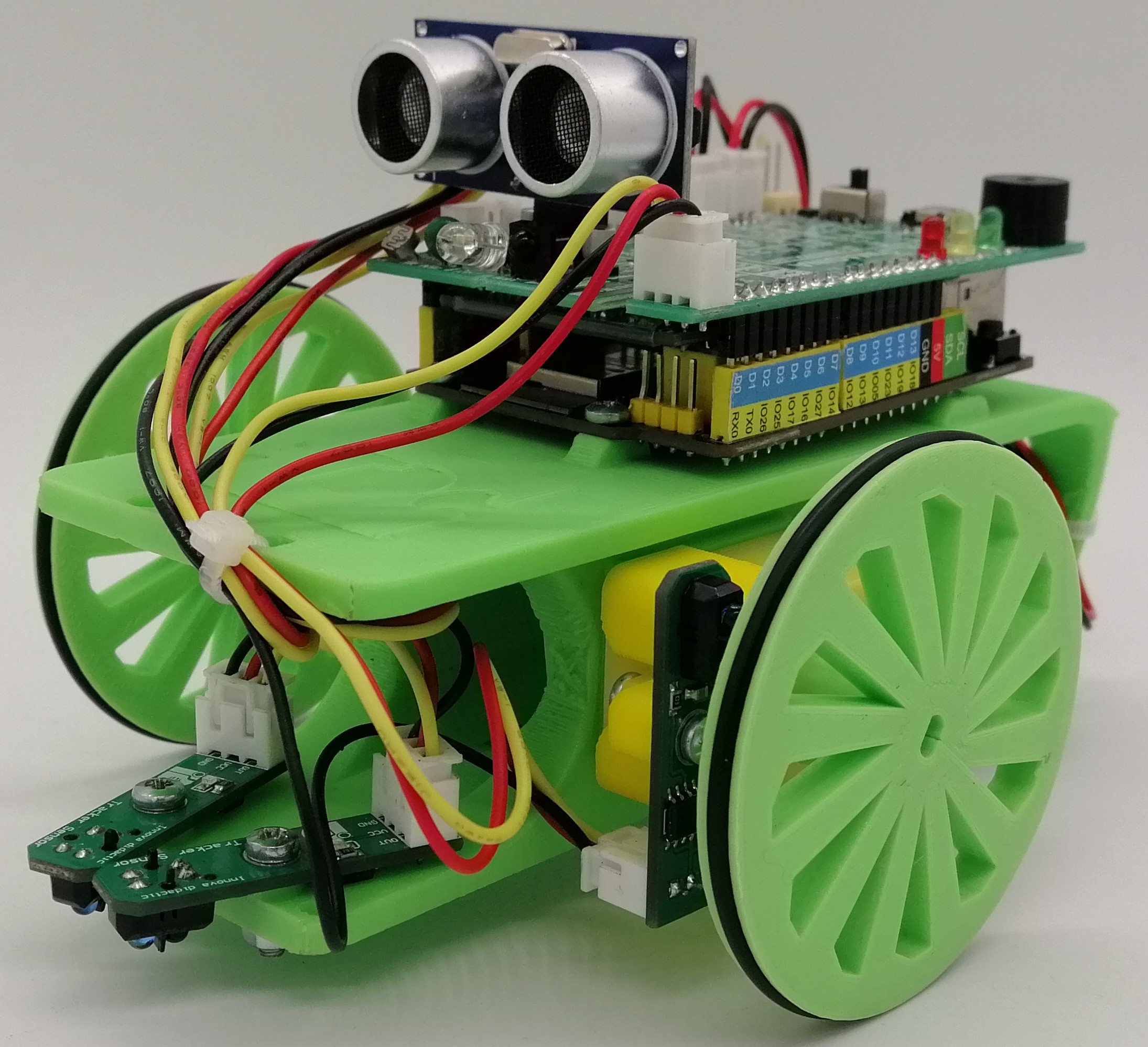
Resultado final