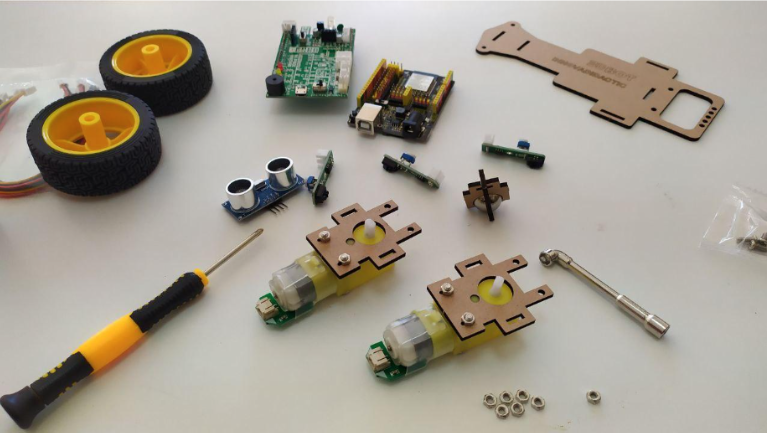
Contingut del kit
Contingut del kit Contingut del kit
Contingut del kit
Pas 1
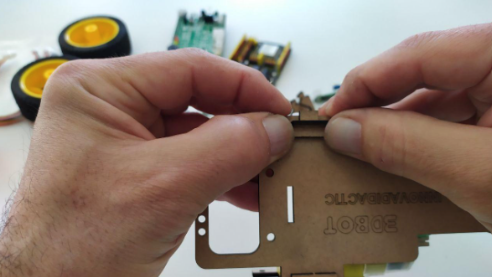
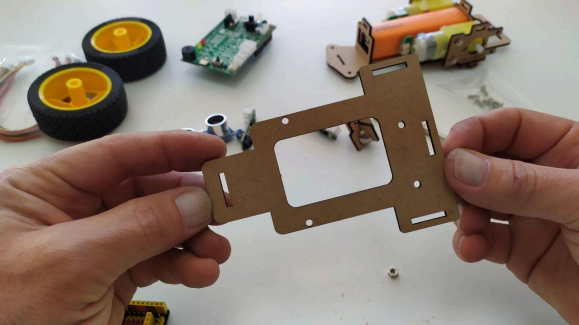
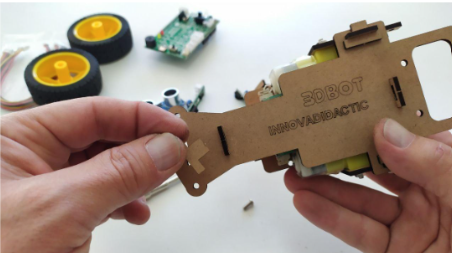
- Desencaixa les peces de la làmina, que componen del conjunt del xassís.
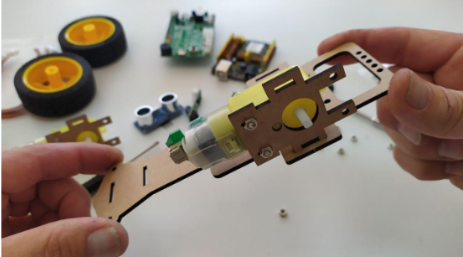
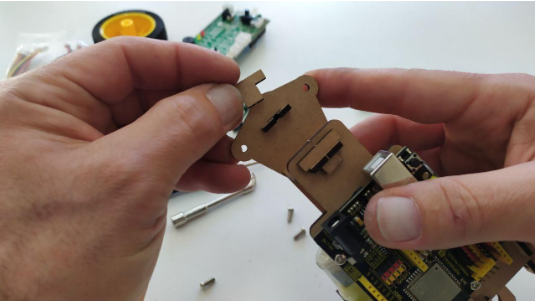
Comença amb les peces que formen la zona de la bola d'acer. Aquest encaix és delicat i, per tant, cal que prestis atenció a la seva manipulació.
Recorda que les peces són d'un material similar a la fusta (DM), ajusten perfectament, però tingues en compte la seva fragilitat si en forces l'encaix.
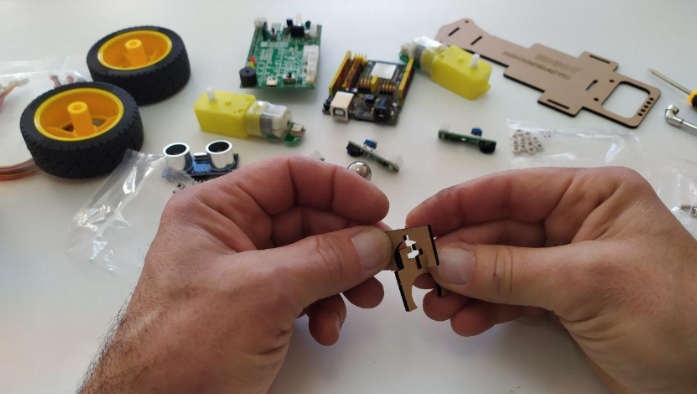
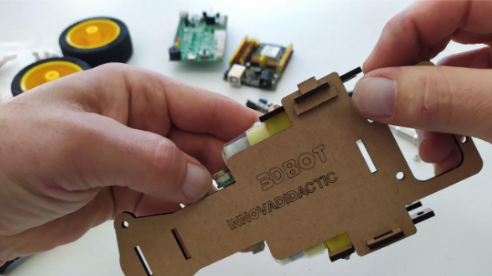
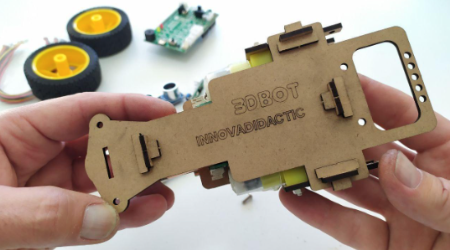
- Encaixa ambdues peces i aconseguiràs un conjunt robust, col·locant les peces sobre la taula i fent pressió de forma uniforme amb ambdós dits, com mostren les imatges:

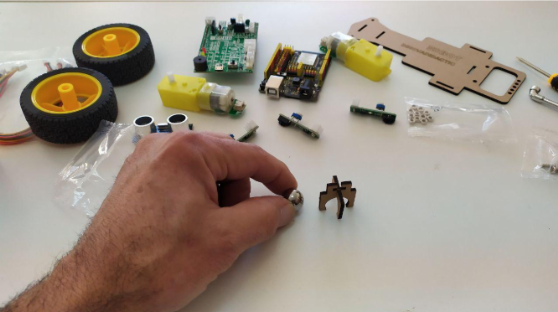
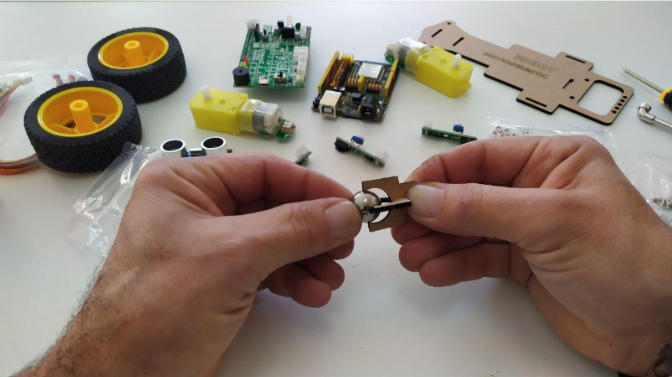
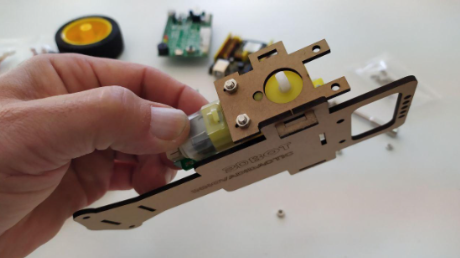
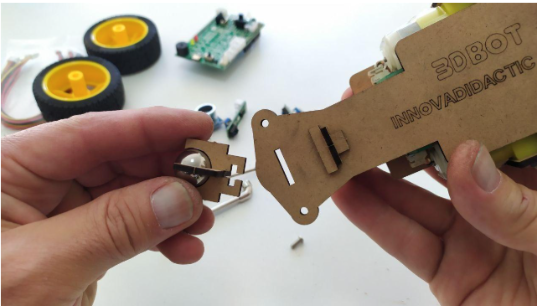
- Una vegada creat el conjunt insereix-hi la bola.
Entrarà de forma suau, quedant un grup final que donarà mobilitat al robot per la seva part posterior.
Pas 2
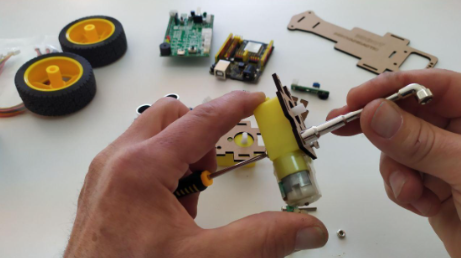
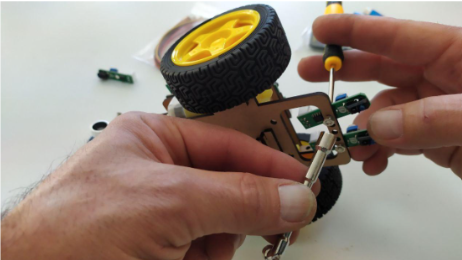
- Seguidament, munta els suports d'ambdós motors:
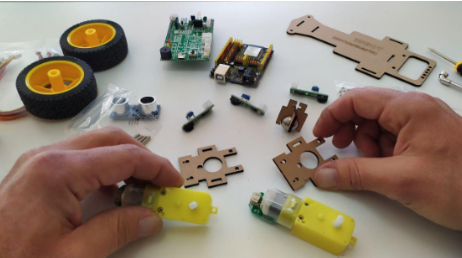
- Introdueix els cargols M3 de 25 mm per la part posterior del motor i acaba la fixació amb les femelles M3 per la seva part exterior, fent ús de les eines (tornavís i clau de tub):
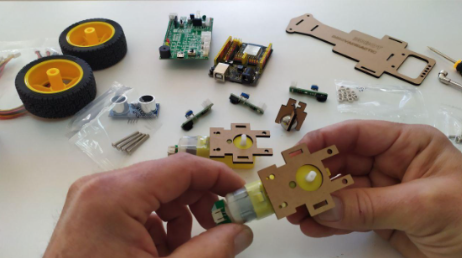
Pas 3
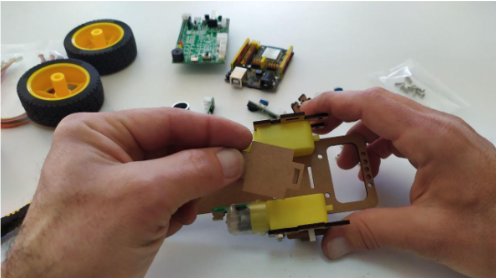
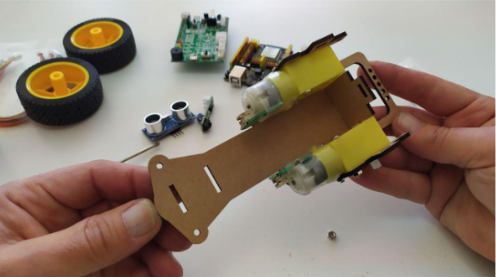
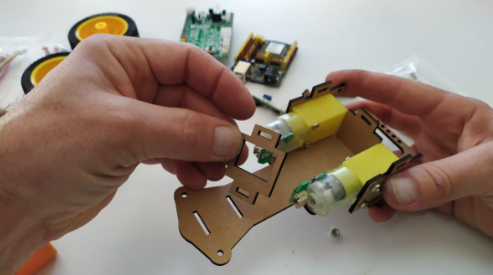
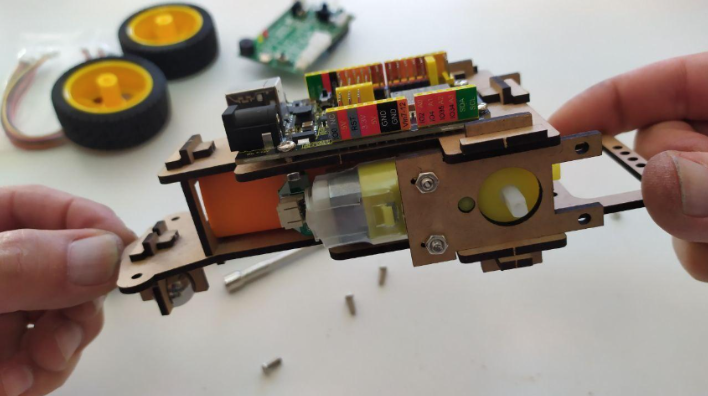
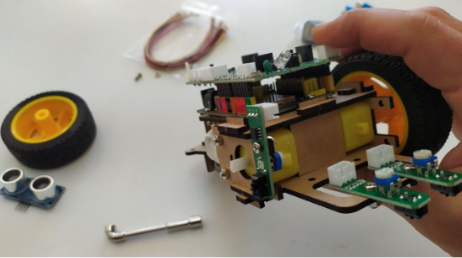
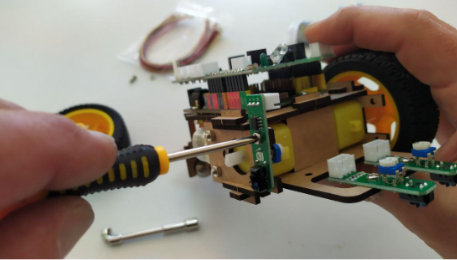
- Amb els dos suports de motors fixats, munta el xassís per la seva part inferior.
Encaixa cada un dels motors a la làmina que forma la part de sota del xassís.
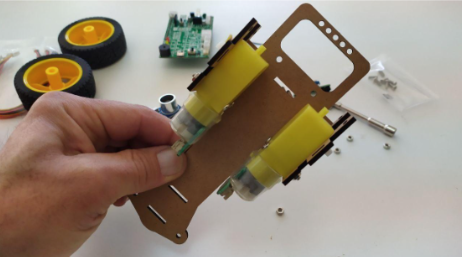

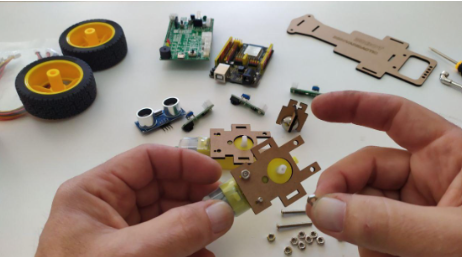
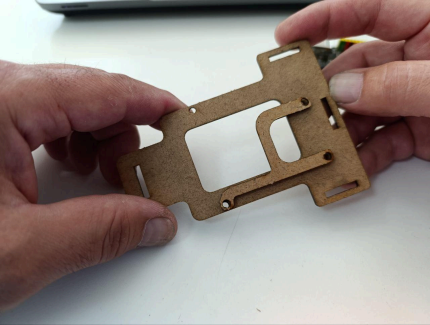
- Una vegada encaixats, insereix les peces en forma de T per a fixar el conjunt i donar-li robustesa.
Aquestes petites peces tenen certa dificultat a l'hora de ser inserides, però és possible. I donen així molta solidesa a tot el grup de peces que formes el robot.
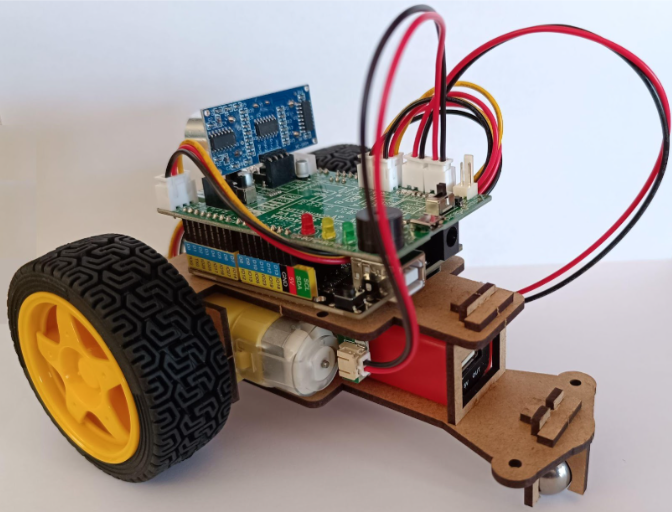
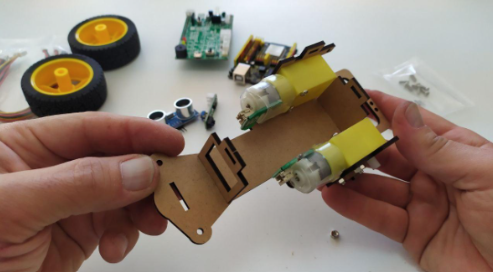
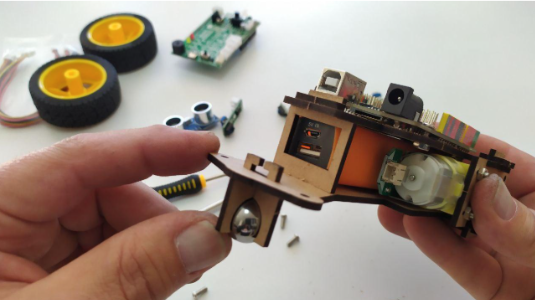
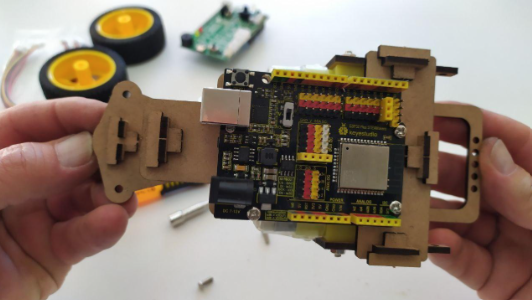
- Ara encaixa la part que farà de topalla la powerbank per la part davantera:
- A continuació la peça de la part del darrere:
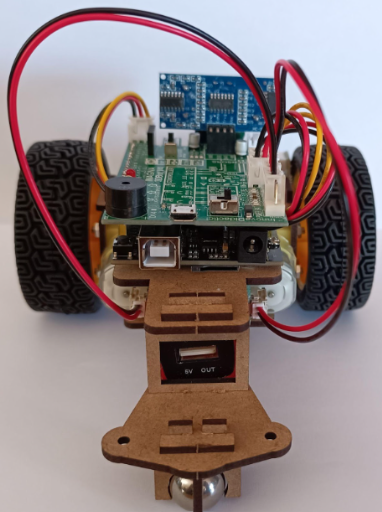
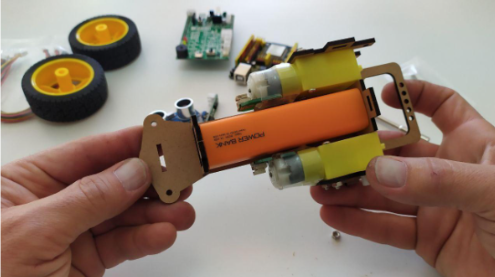
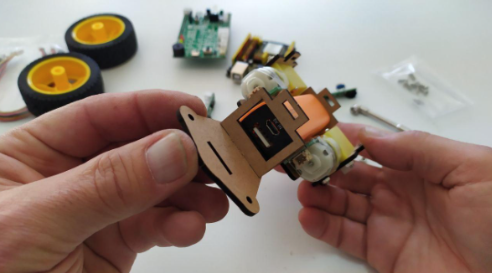
- Col·loca la powerbank al seu «interior». Tingues en compte que la zona de càrrega de la powerbank va cap a la part del darrera del robot. I que les connexions (ports USB) han d'estar centrats a la «finestra» d'aquesta peça. Comprova que pots connectar els dos extrems del cable USB als dos ports!
Pas 4
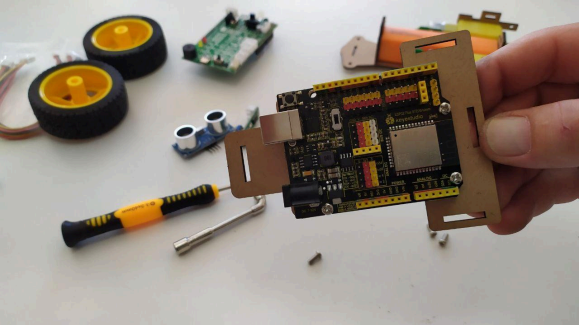
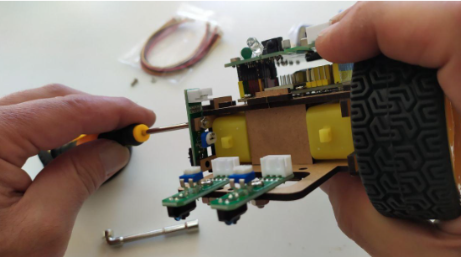
 Després fixa la placa ESP32STEAMakers a la peça superior del xassís mitjançant la peça en forma d'Y perquè quedi elevada. Amb aquesta peça aconseguim que la plaça quedi millor fixada:
Després fixa la placa ESP32STEAMakers a la peça superior del xassís mitjançant la peça en forma d'Y perquè quedi elevada. Amb aquesta peça aconseguim que la plaça quedi millor fixada:
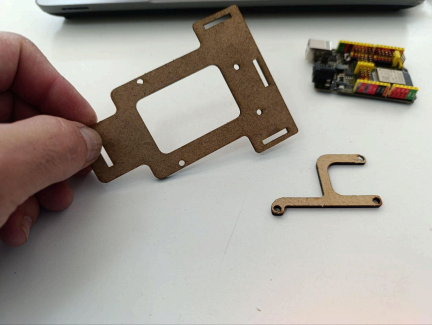

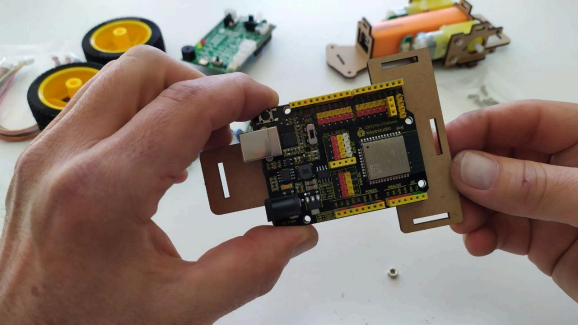
- Només caldrà ancorar la placa per 3 punts amb els cargols curts M3 i fent ús de les eines:

Hauria de quedar així:


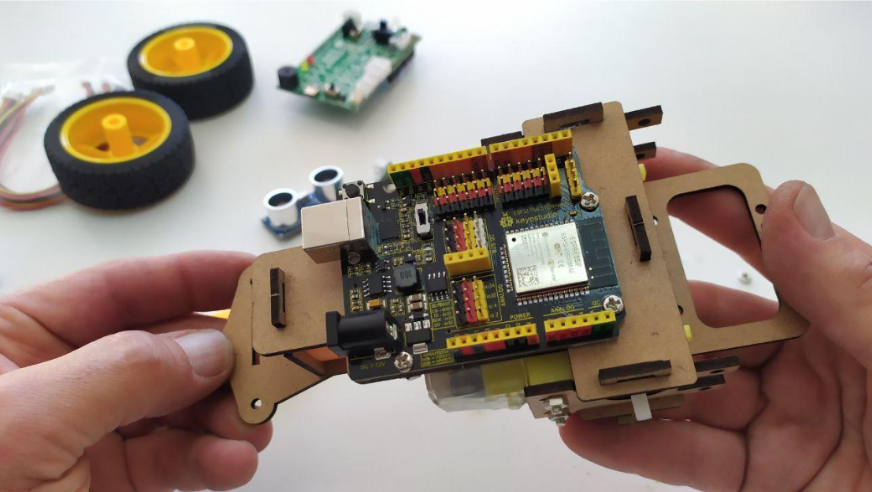
- Segueix encaixant la part superior del xassís. El robot comença a prendre forma.
Pas 5
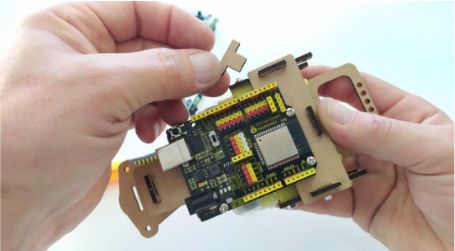
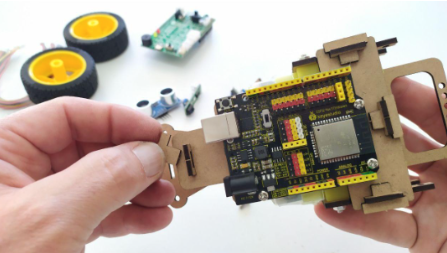
- Ara col·loca totes les peces en forma de T per a donar rigidesa a tot el conjunt:
Pas 6
- Encaixa ara la peça de la bola i el seu passador en T:
Pas 7
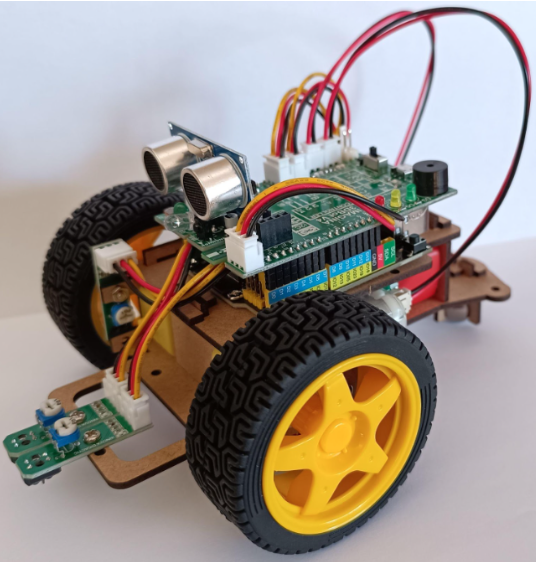
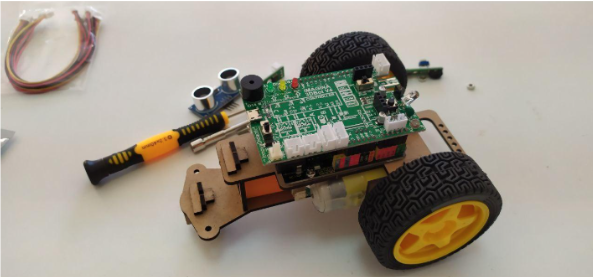
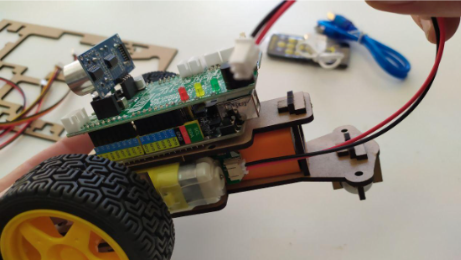
- Connecta la placa Imagina 3DBot a l'ESP32STEAMakers:
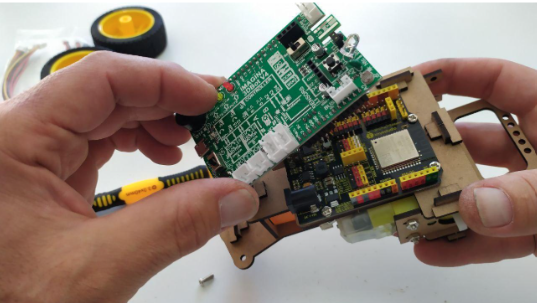
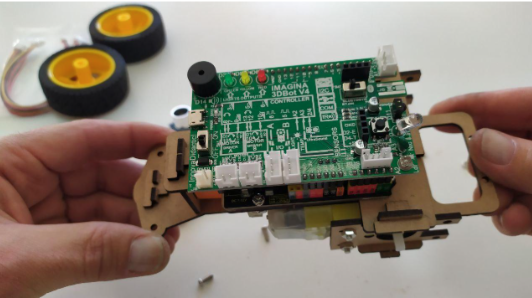
Aquí pots veure muntadesles rodes per a veure l'aparença del conjunt, però NO cal encara:
Pas 8
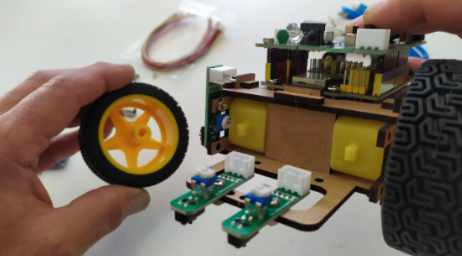
- Munta els sensors seguidors de línia TCRT5000 (millor a sota del suport!):
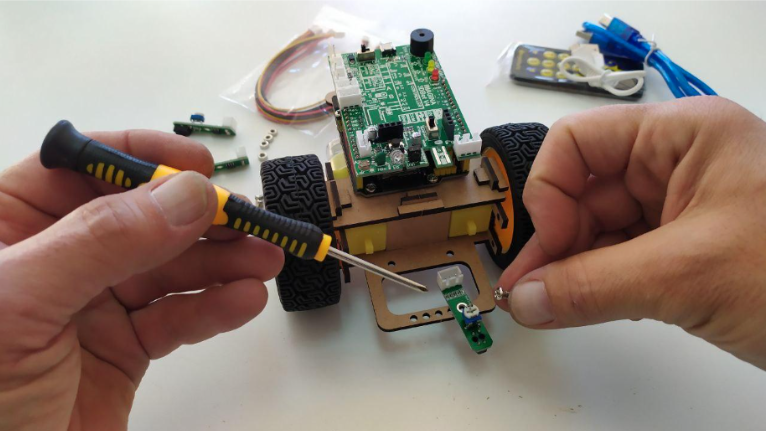
- Fixa els dos sensors frontals amb els cargols M3x8 fent ús de les eines:
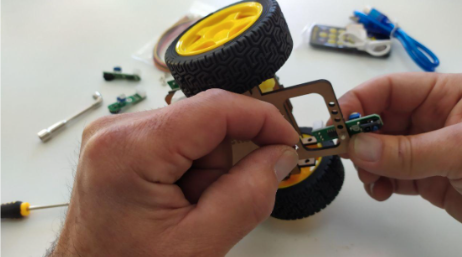
- Treu una de les rodes (recorda que no calia muntar-les) i fixa l'altre sensor en al lateral:

Pas 10
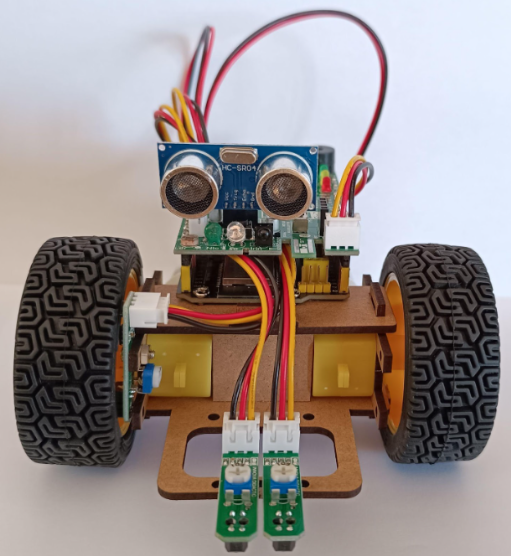
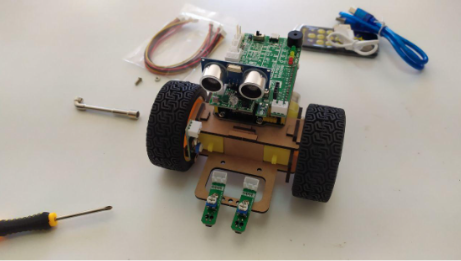
- Connecta el sensor d'ultrasons per la detecció d'obstacles.
El sensor d'ultrasons es connecta directament a la placa Imagina, sense cables, al connector de 4 pins que hi ha darrera del polsador D2.
Pas 11
- En aquest punt ja pots iniciar el cablejat dels components electrònics:
Connexió de motors
Motor esquerra DRIVER A
Motor dreta DRIVER B
 - driver B (motor dreta)")
Connexió dels sensors seguidors de línia
Sensor esquerra SL
Sensor dreta SR
Sensor lateral A1
![]()
Vés amb compte amb el cablejat. Pot interferir amb el sensor de distància.
Per evitar que els cables dels sensors seguidors de línia quedin per davant del sensor d'ultrasons i del sensor d'infraroig, fes-lo passar per entre les dues plaques fins als connectors corresponents: