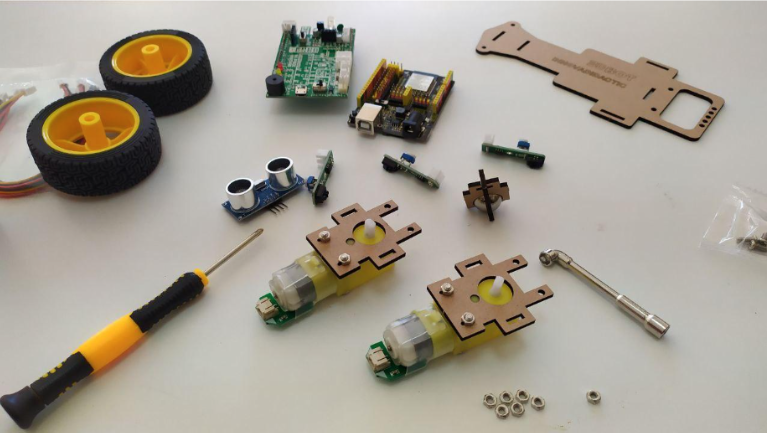
Contenido del kit
Contenido del kit Contenido del kit
Contenido del kit
Paso 1
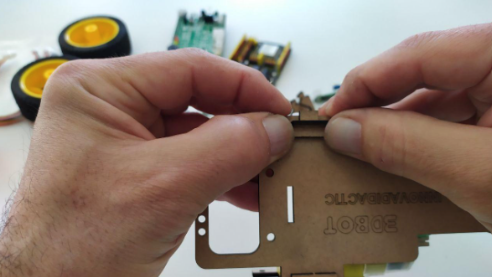
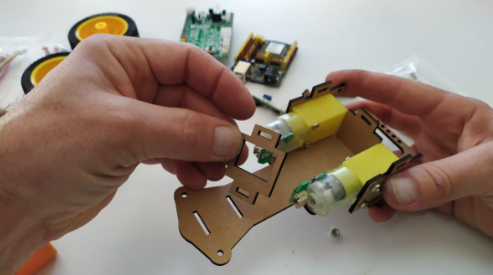
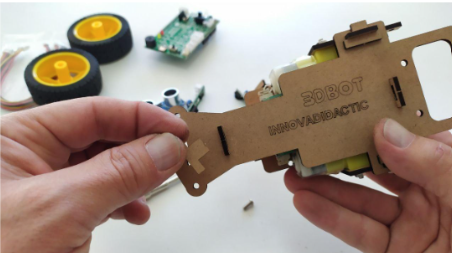
- Desencaja las piezas de la lámina, componen el conjunto del chasis.
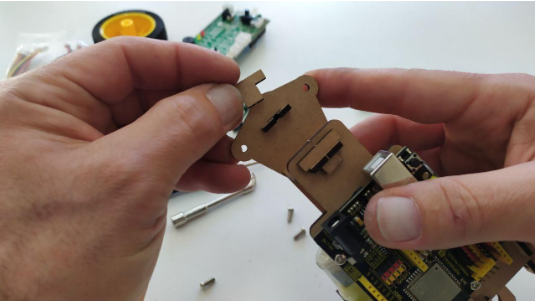
Empieza con las piezas que forman la zona de la bola de acero. Este encaje es delicado y, por tanto, debes prestar atención a su manipulación.
Recuerda que las piezas son de un material similar a la madera(DM), ajustan perfectamente, pero ten en cuenta su fragilidad si fuerzas el encaje.
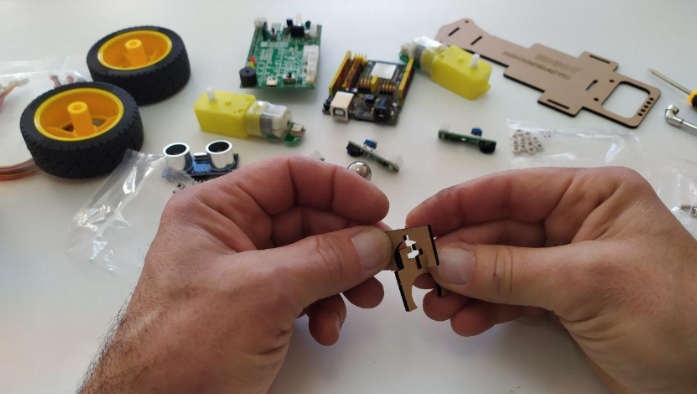
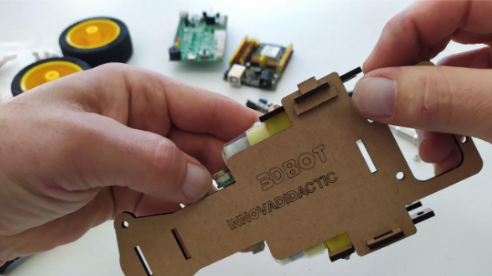
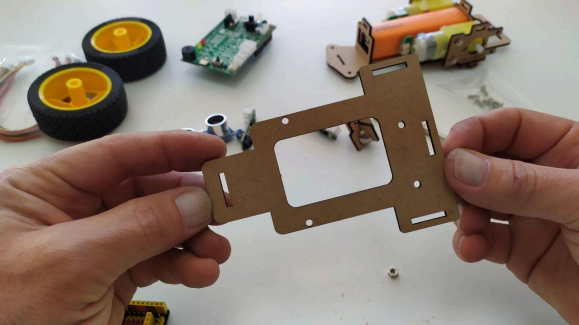
- Encaja ambas piezas y conseguirás un conjunto robusto, colocando las piezas sobre la mesa y haciendo presión de forma uniforme con ambos dedos, como muestran las imágenes:

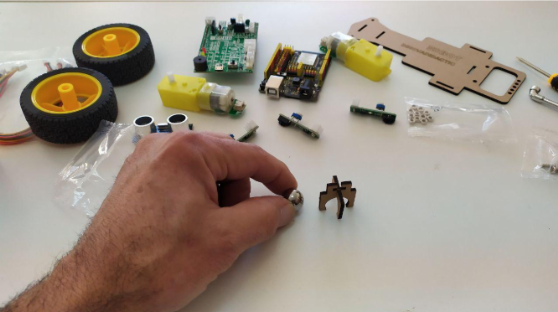
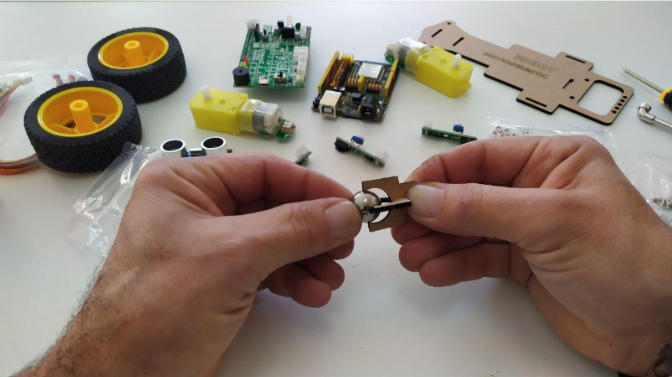
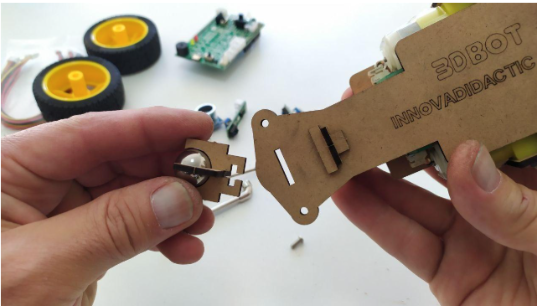
- Una vez creado el conjunto inserta la bola.
Entrará de forma suave, quedando un grupo final que dará movilidad al robot por su parte trasera.
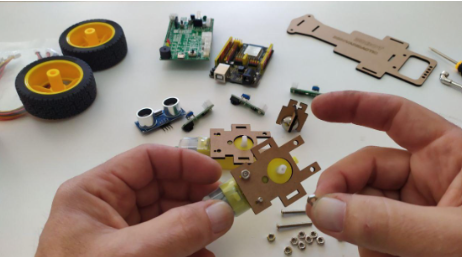
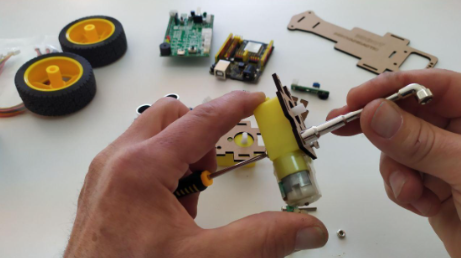
Paso 2
- Seguidamente, monta los soportes de ambos motores:
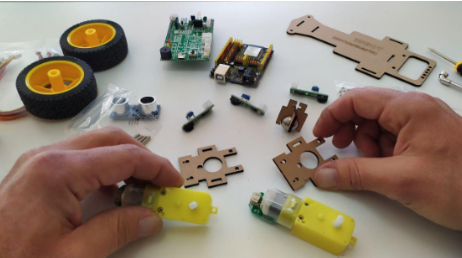
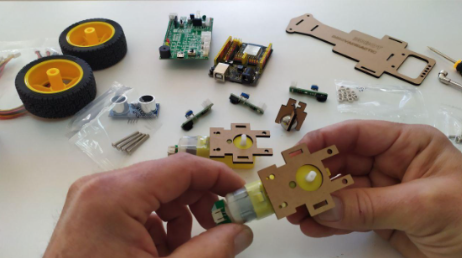
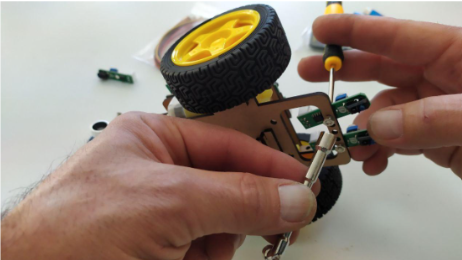
- Introduce los tornillos M3 de 25 mm por la parte posterior del motor y termina la fijación con las hembras M3 por su parte exterior, haciendo uso de las herramientas (destornillador y llave de tubo):
Paso 3
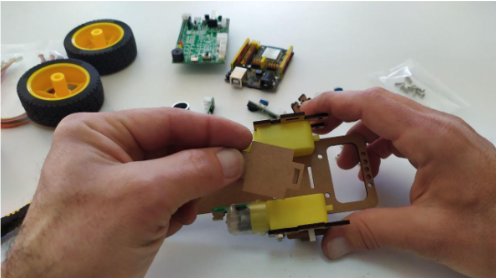
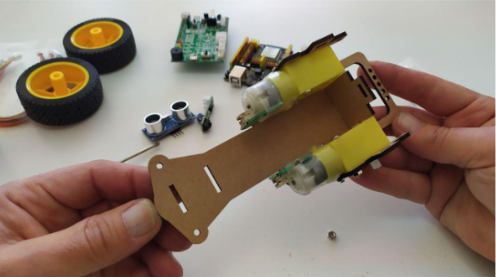
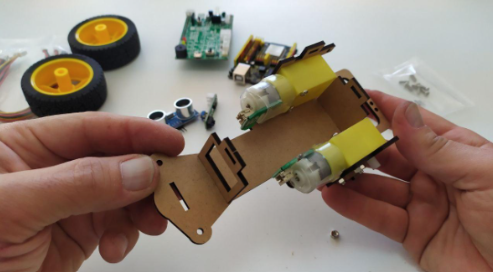
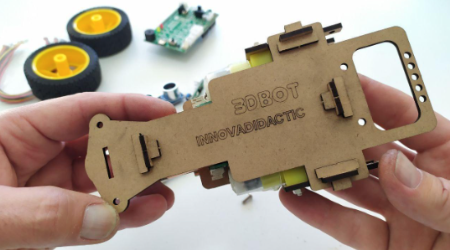
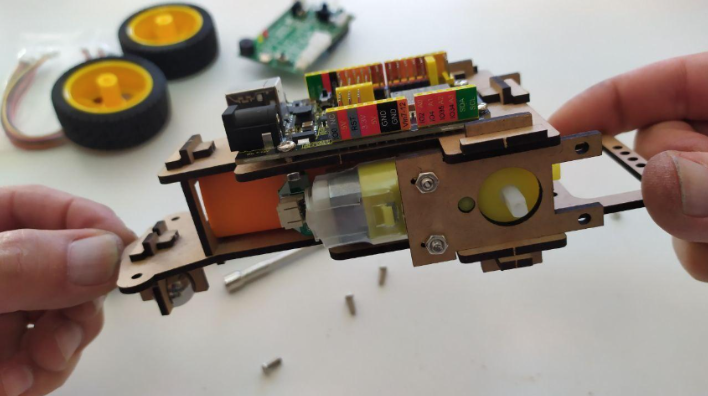
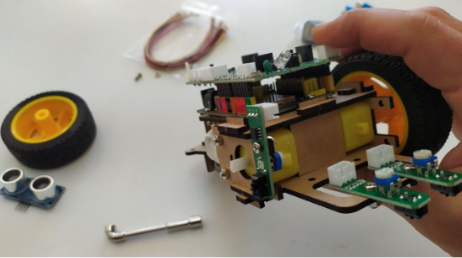
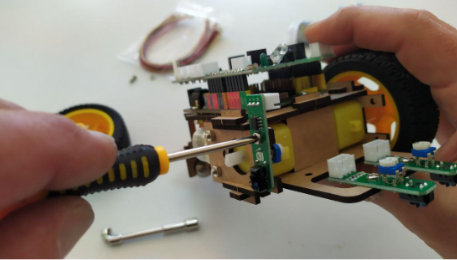
- Con los dos soportes de motores fijados, monta el chasis por su parte inferior.
Encaja cada uno de los motores en la lámina que forma la parte de debajo del chasis.
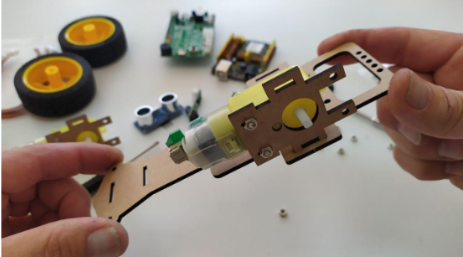
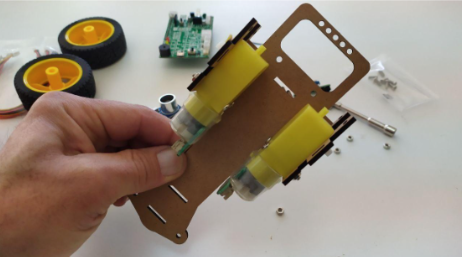

- Una vez encajados, inserta las piezas en forma de T para fijar el conjunto y darle robustez.
Estas piezas pequeñas tienen cierta dificultad para ser insertados, pero es posible. Dan así mucha solidez a todo el grupo de piezas que forman el robot.
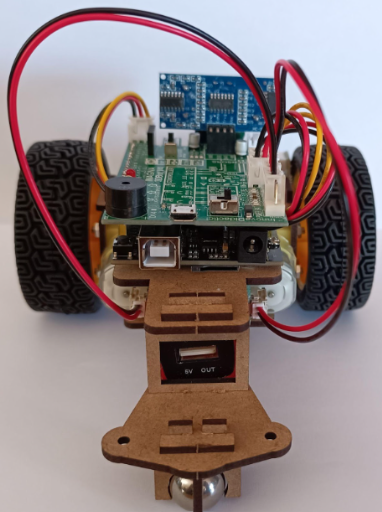
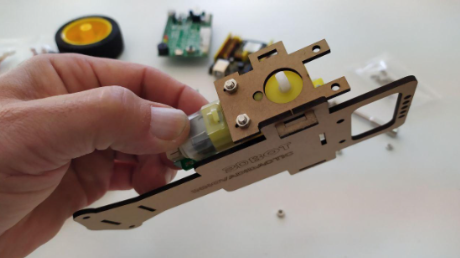
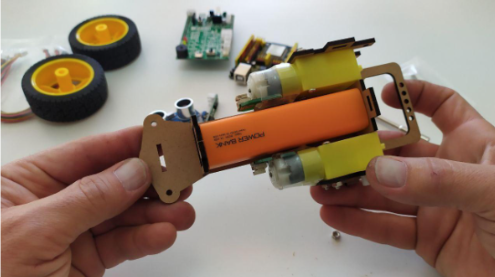
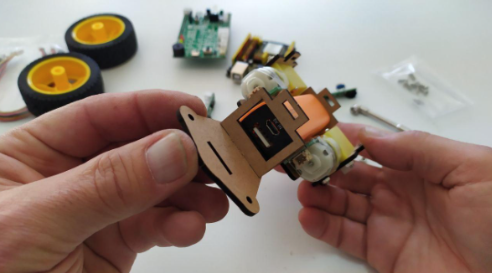
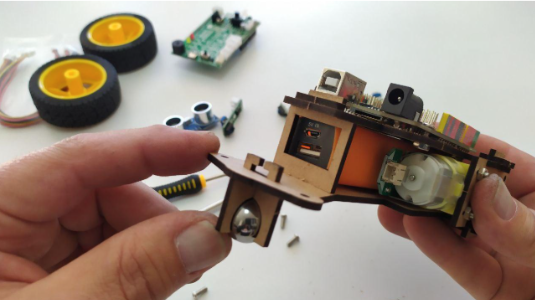
- Ahora encaja la parte que hará de tope al powerbank por la parte delantera:
- A continuación la pieza de la parte trasera:
- Coloca el powerbank en su “interior”. Ten en cuenta que la zona de carga de la powerbank va hacia la parte trasera del robot y que las conexiones (puertos USB) deben estar centrados en la “ventana” de esta pieza. ¡Comprueba que puedes conectar los dos extremos del cable USB a los dos puertos!
Paso 4
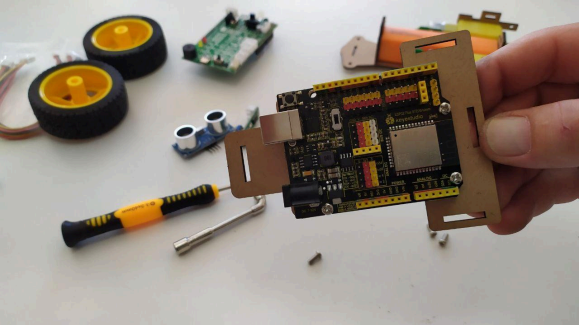
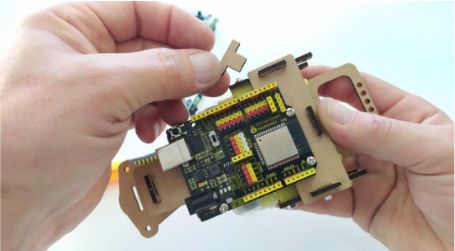
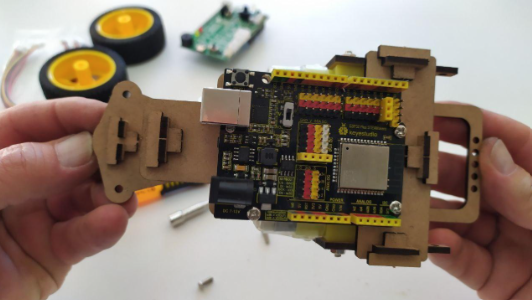
 Después fija la placa ESP32STEAMakers en la pieza superior del chasis mediante la pieza en forma de Y para que quede elevada. Con esta pieza conseguimos que la placa quede mejor fijada:
Después fija la placa ESP32STEAMakers en la pieza superior del chasis mediante la pieza en forma de Y para que quede elevada. Con esta pieza conseguimos que la placa quede mejor fijada:
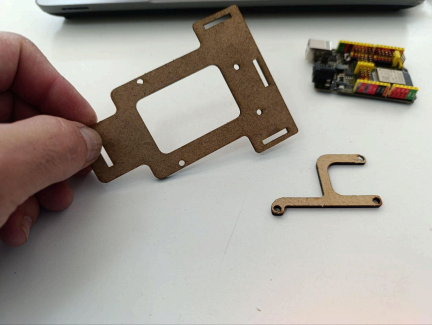

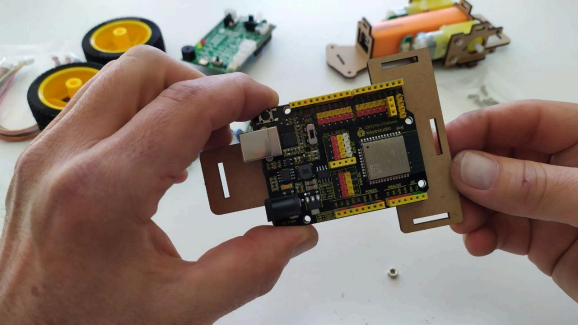
- Sólo será necesario anclar la placa por 3 puntos con los tornillos cortos M3 haciendo uso de las herramientas:

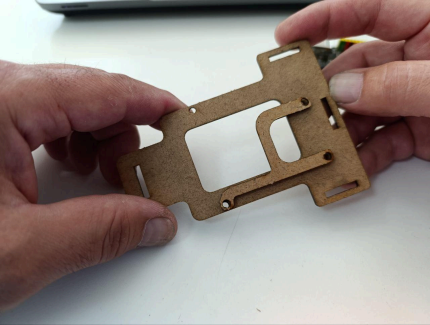
Debería quedar así:


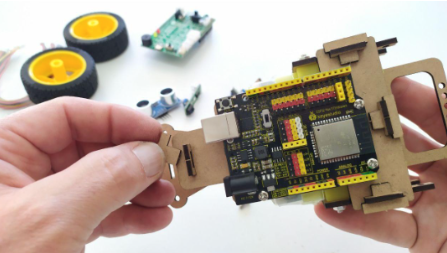
- Sigue encajando la parte superior del chasis. ¡El robot empieza a tomar forma!
Paso 5
- Ahora coloca todas las piezas en forma de T para dar rigidez a todo el conjunto:
Paso 6
- Encaja ahora la pieza de la bola y su pasador en T:
Paso 7
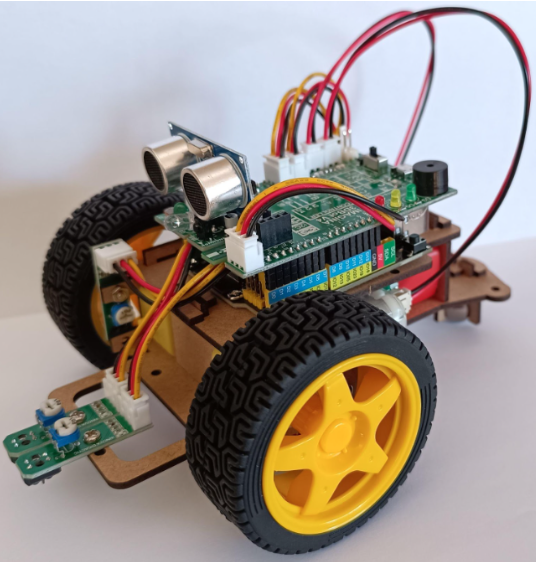
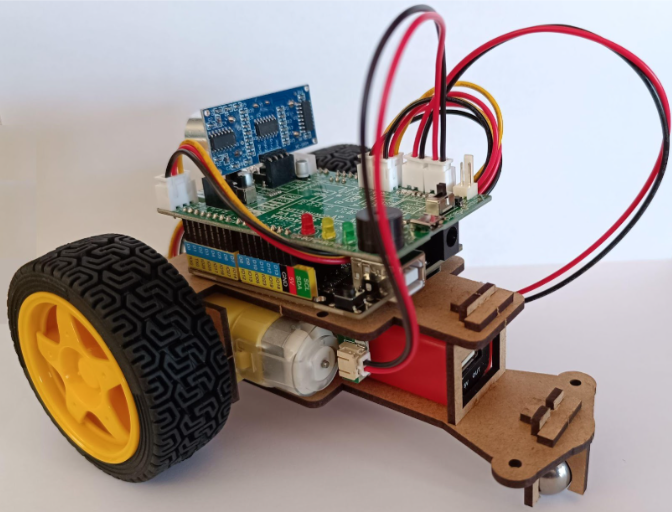
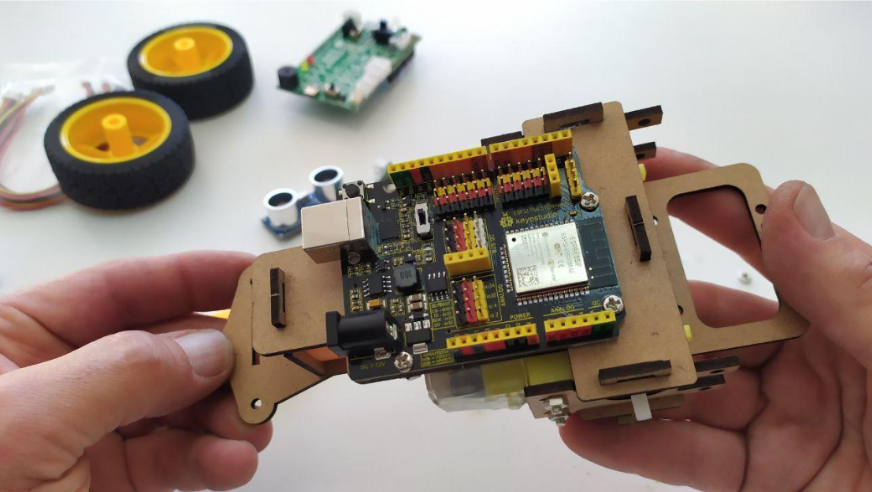
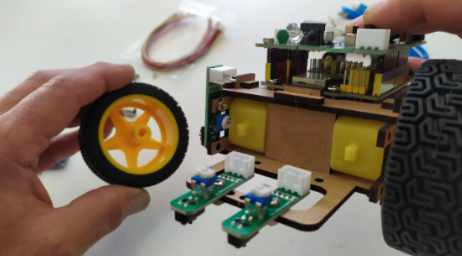
- Conecta la placa Imagina 3DBot a la ESP32STEAMakers:
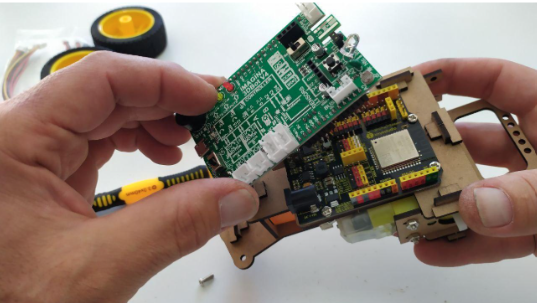
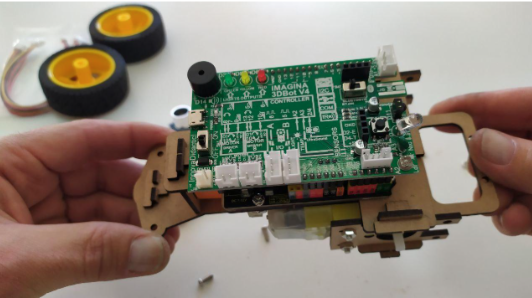
Aquí puedes ver montadas las ruedas para ver la apariencia del conjunto, pero NO hace falta montar todavía:
Paso 8
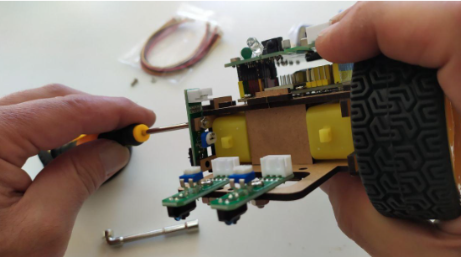
- Monta los sensores seguidores de líneas TCRT5000 (¡mejor debajo del soporte!):
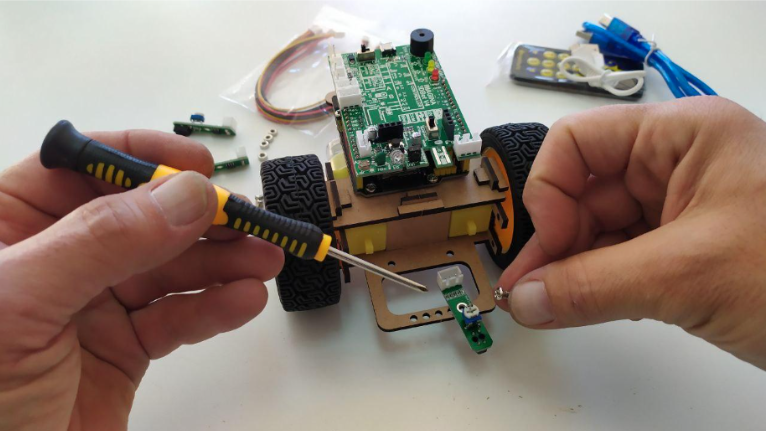
- Fija los dos sensores frontales con los tornillos M3x8 haciendo uso de las herramientas:
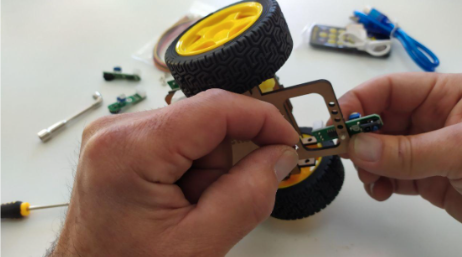
- Saca una de las ruedas (recuerda que no era necesario montarlas) y fija el otro sensor en el lateral derecho:

Paso 10
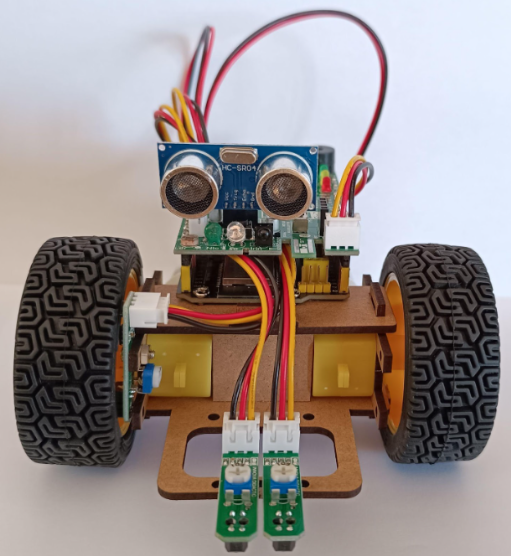
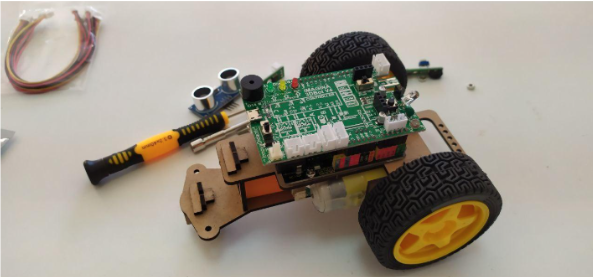
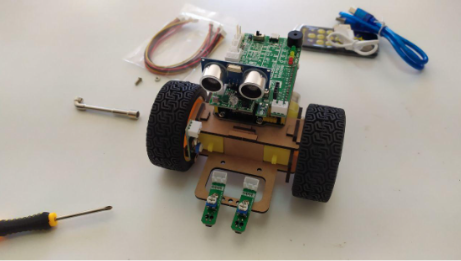
- Conecta el sensor de ultrasonidos para la detección de obstáculos.
El sensor de ultrasonidos se conecta directamente a la placa Imagina, sin cables, al conector de 4 pines que hay detrás del pulsador D2.
Paso 11
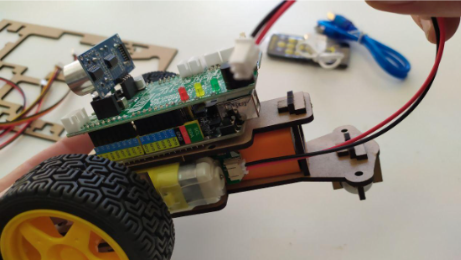
- En este punto ya puedes iniciar el cableado de los componentes electrónicos:
Conexión de motores
Motor izquierdo DRIVER A
Motor derecho DRIVER B
 - driver B (motor derecho)")
Conexión de sensores seguidores de línea
Sensor izquierdo SL
Sensor derecho SR
Sensor lateral A1
![]()
Atención con el cableado. Puede interferir con el sensor de distancia.
Para evitar que los cables de los 3 sensores seguidores de línea queden por delante del sensor de ultrasonidos y del sensor de infrarojo, hazles pasar por dentro de las dos placas hasta los conectores correspondientes: