A10. Sensores de línea I
El sensor de líneas del KEYBOT está formado por tres sensores infrarrojos TCRT5000. Su principio de funcionamient es la de emitir una señal infrarroja (emisor) y detectar la cantidad reflejada (receptor). En el caso de que el color sea negro,este color absorbe toda la luz pero si es de color blanco la refleja. Por tanto, si el color es negro devolverá un valor Alto (1) y si es blanco devolverá un valor Bajo (0). La altura de detección está comprendida entre 0,5 y 3 cm.

El sistema de identificación de línea del KEYBOT está compuesto por 3 sensores de ese tipo. En la parte superior hay tres potenciómetros para poder ajustar la sensibilidad. Al lado de cada potenciómetro hay un pequeño led rojo que se enciende cuando el sensor detecta el color blanco y se apaga con el color negro.

Los sensores de línea estan conectados a la entrada analógica triple A1, A2, A3. Cada uno corresponde a los sensores S1, S2 y S3 respectivamente.

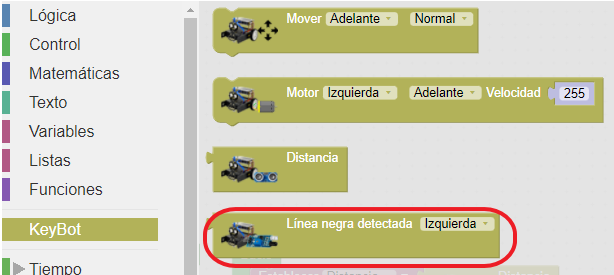
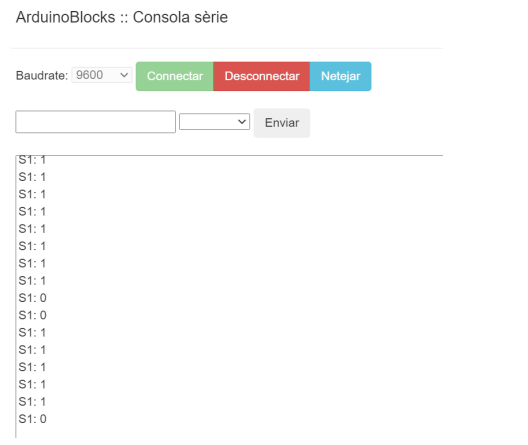
A continuación, haremos un programa que envíe si detecta blanco o negro con el sensor S1 a la “Consola” cada 100ms. Utilizaremos uno de los bloques específicos del KEYBOT.

Los valores que veremos en la “Consola” sólo podrán ser 0 o 1. Por tanto, este tipo de valor es de tipo Boolean.
Activitat de ampliación: haz un programa que lea los tres sensores y después los muestre por la “Consola” cada 50ms. Deberá crear un nuevo tipo de variable Boolean.

Solución:
