Programación del servo
Programación con MicroBlocks

Antes de utilizar la placa ESP32 STEAMakers con MicroBlocks es necesario configurarla.
Con la placa conectada al puerto USB y al entorno MicroBlocks ( aquí se explica cómo hacerlo), utilice cualquiera de los siguientes métodos.
Atención
Conecte el servomotor al pin D10 (IO05).
#Método 1: librería Servomotor
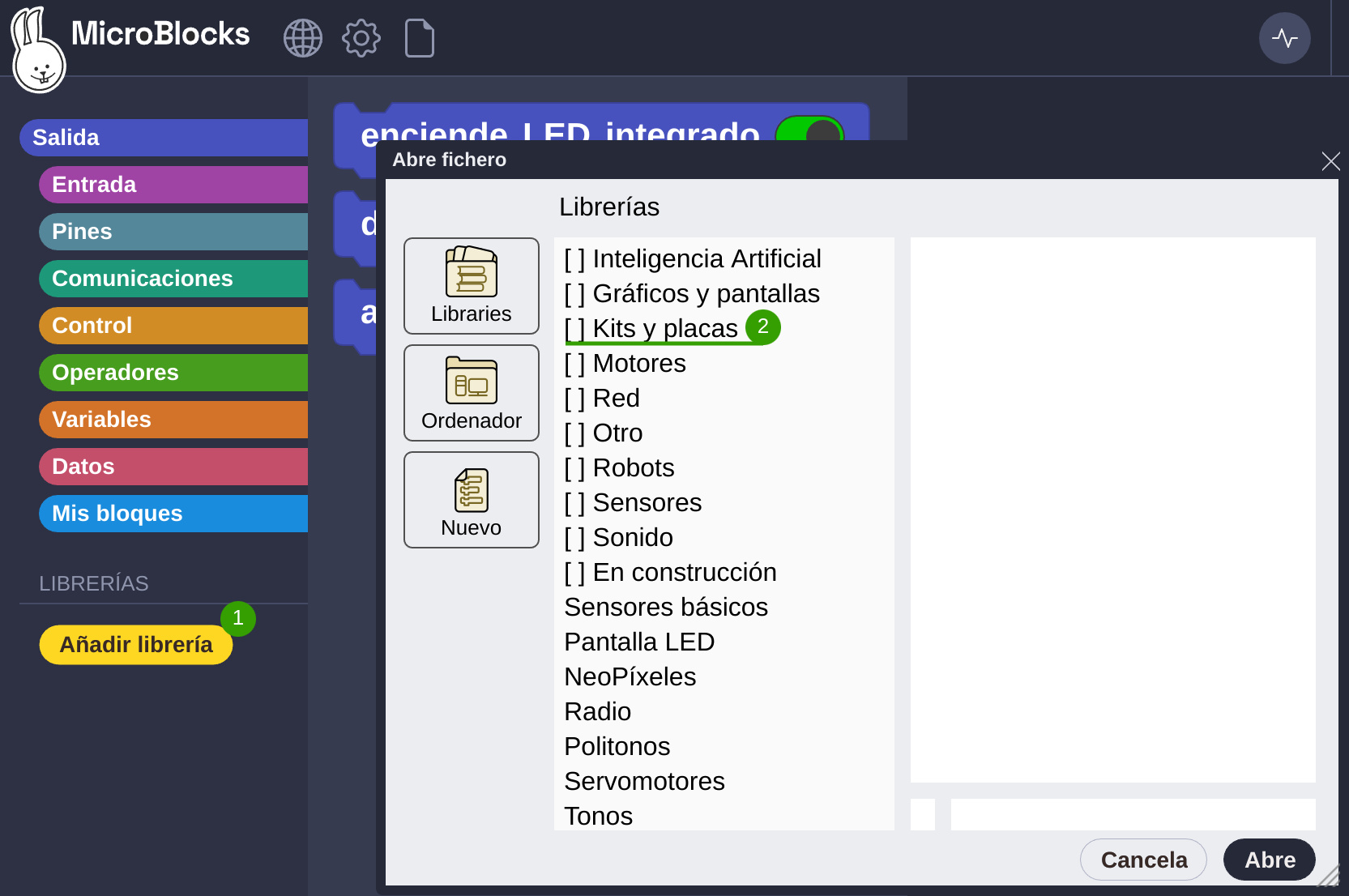
1.- Cargue la librería “Servomotores” haciendo clic en el botón Añadir librería. En la ventana emergente, haga doble clic en “Servomotores”:

2.- En la columna izquierda aparecerá una nueva categoría: “Servomotores”.
Haga clic sobre ella para ver los bloques que contiene.
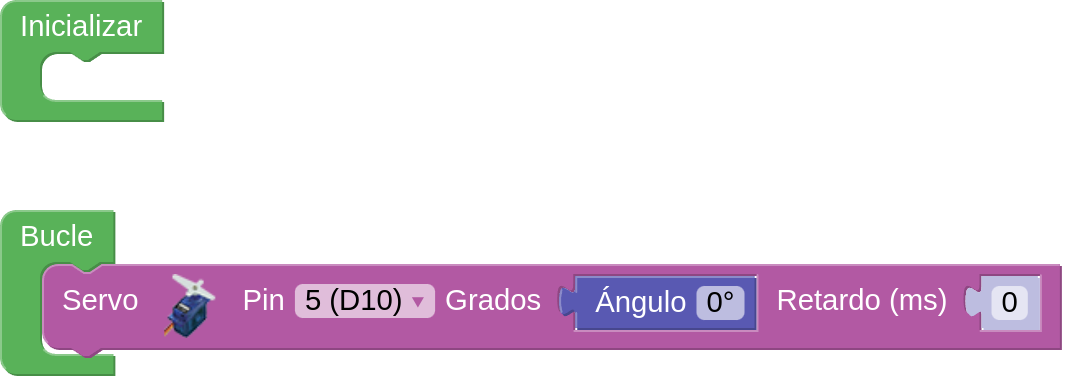
3.- Seleccione el bloque “pon el servo …” que se muestra en la imagen:

4.- Conecte el servomotor al pin 5. Si utiliza un pin diferente, ponga este valor en el primer parámetro del bloque.
El segundo es el ángulo. Debe ser “90” grados.
5.- Haga clic en el blog para posicionar al servomotor.
#Método 2: librería Smart Home
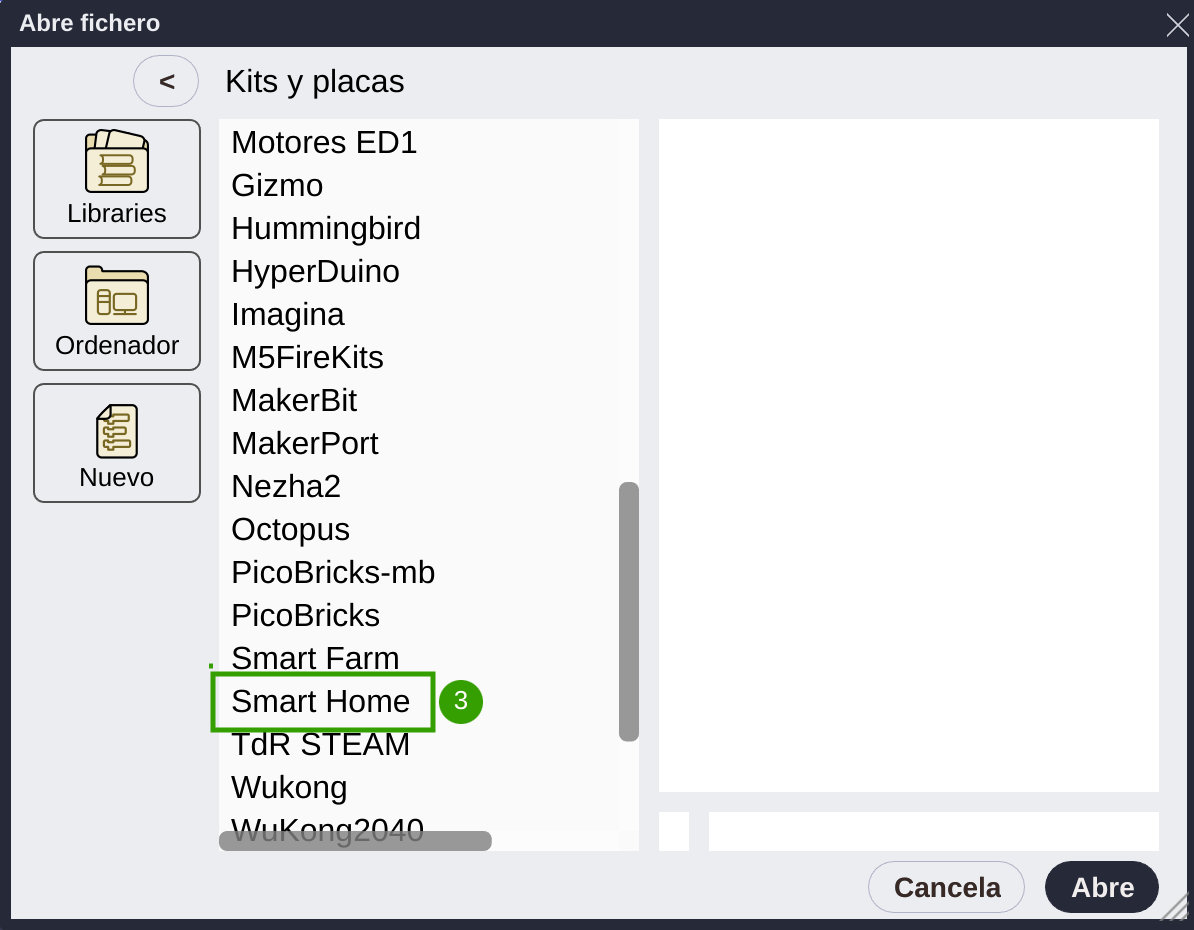
1.- Cargue la librería “Smart Home”:
![]() Añadir librería ›
Añadir librería › ![]() Kits y placas ›
Kits y placas › ![]() Smart Home
Smart Home
2.- Busque el bloque
 .
.
En la lista desplegable, cambie el valor “abre” por “cierra”.
3.- Haga clic en el bloque anterior para posicionar al servomotor.
Programación con STEAMakersBlocks
![]()
Para poder establecer comunicación entre el entorno de programación STEAMakersBlocks y la placa, es necesario instalar y ejecutar un programa: AB-Conector.
En el enlace anterior también encontrará instrucciones para empezar a utilizar STEAMakersBlocks.
Elabore el siguiente programa y cárguelo en la placa ESP32STEAMakers para posicionar correctamente el servomotor. Conecte el servomotor al pin IO05 (D10):
Atención
Conecte el servomotor al pin IO05 (D10).
El código del programa resultante es el siguiente:
#include <ESP32Servo.h> Servo servo_5; void setup() { servo_5.attach(5); } void loop() { yield(); servo_5.write(0); }