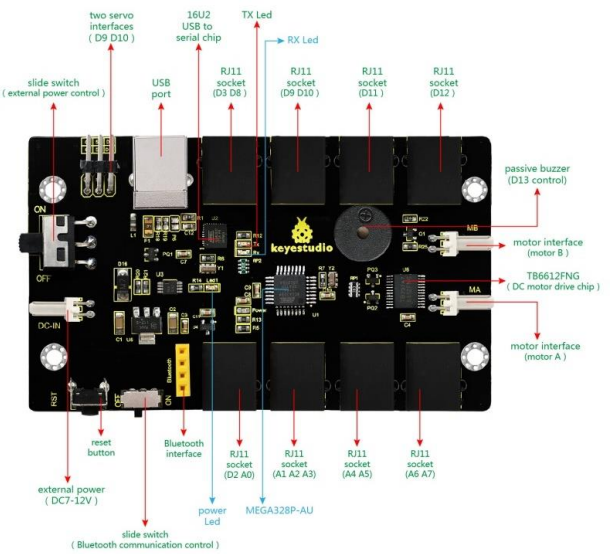
Placa de control Keybot Control Board v2.0
La placa de control Keybot Control Board 2.0 es una placa electrónica basada en Arduino pero adaptada a las necesidades de nuestro robot. En la placa vienen integrados todos los elementos para el control de los sensores y actuadores del robot, ya sean los drivers para el control de los motores, interruptor de alimentación, connectores para los sensores y actuadores, zumbador, conector Bluetooth, etc.
Placa de control Keybot Control Board v2.0:
Detalles técnicos de la placa
Keybot Control Board 2.0
- Circuito de control principal: ATMEGA328P-AU
- Circuito de control de motores: TB6612FNG
- Circuito de transmisión USB-serie: ATMEGA16U2-MU
- Tensión de entrada: DC 7-12V
- Corriente para los motores: 1.2A (media) / 3.2A (máxima)
- Corriente de Standby: 47mA
- Zumbador pasivo: D13 control
- Control de dirección de motores: D4 (motor A) y D7 (motor B)
- Control de velocidad de motores: D5 (motor A) y D6 (motor B)
- Interruptor de alimentación (interruptor grande)
- Interruptor de comunicaciones Ordenador-Bluetooth (interruptor pequeño)
- Conector para módulo Bluetooth
- Conector doble de 3 pines para motor para el control de 2 servo motores: D9 y D10 control
- Botón de Reset
- Conector de alimentación
- 2 Conectores para motores (MA y MB)
- 8 Conexiones RJ11:
- A0-D2
- A1-A2-A3
- A4-A5 (I2C)
- A6-A7
- D3-D8
- D9-D10
- D11
- D12
- Led indicador de alimentación
- Leds Rx y Tx para indicar las comunicaciones
Tabla de conexiones de los diferentes elementos del robot KEYBOT en la placa de control:
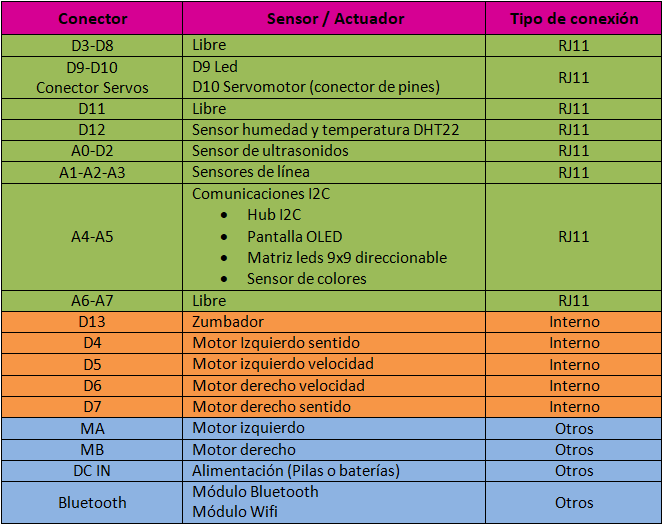
En esta placa de control ya están las entradas y salidas definidas. La placa se basa en una placa Arduino UNO. Dispone de un driver de motores, un zumbador (Pin D13) y dos conexiones para servo motores (pins D9 y D10).
La placa dispone de entradas Analógicas (A) y de entradas/salidas Digitales (D) todas ellas con conexiones RJ11 para evitar errores en las conexiones.